Invers dan Forward Kinematik Untuk Robot SCARA 5 DOF
” Teori kinematika robot berikut ini saya kutip dari laporan penelitian robotika milik saya pribadi, silakan jika adik-adik mahasiswa membutuhkan teori kinematika robot untuk laporan tugas akhir atau apa saja. Jangan lupa cantumkan link wordpress ini sebagai referensi. Jika ada pertanyaan atau koreksi silakan hubungi saya di djukarna@unpar.ac.id atau djukarna@gmail.com “
Kinematika Robot Scara
Sebuah lengan robot atau manipulator adalah gabungan link dengan sendi (joint). Beberapa link dan sendi digabungkan menjadi satu kesatuan yang membentuk sebuah lengan robot. Terdapat 2 jenis pergerakan pada lengan robot yaitu gerak berputar (rotasi) dan gerak berpindah dalam garis lurus (translasi). Gabungan kedua gerakan ini akan menyebabkan lengan robot berpindah dari satu titik koordinat ke titik koordinat lainnya. Gerak perpindahan lengan robot ini diatur oleh suatu persamaan gerak yang disebut kinematika gerak robot.
Ruang tempat robot bekerja (Space) menggunakan sistem koordinat kartesian yang didefinisikan dalam 3 arah gerak yaitu arah X, arah Y dan arah Z (koordinat x,y,z), sedangkan lengan robot bergerak umumnya dengan kombinasi gerak rotasi dan translasi (kebanyakan gerak rotasi), sehingga dibutuhkan suatu persamaan yang menghubungkan perubahan gerak rotasi translasi ini ke dalam titik koordinat kartesian (x,y,z). Persamaan ini disebut persamaan kinematika robot. Ada 2 tipe kinematika robot yaitu : Forward Kinematic (kinematika maju) dan Inverse Kinematic (kinematik terbalik). Di dalam pemrograman lengan robot kedua tipe kinematika ini sama – sama dibutuhkan.
Robot merupakan gabungan dari beberapa link dan beberapa sendi yang membentuk satu kesatuan gerak. Jenis-jenis sendi pada robot dapat diuraikan seperti pada gambar berikut ini.

Gambar 1 jenis-jenis sendi dan gerak robot
Matrik Rotasi dan Translasi 3D Robot Arm

Gambar 2 vektor satuan dalam ruang ortogonal 3 dimensi
Matrik rotasi 3 dimensi dapat bentuk vektor satuan untuk gambar 2 dapat dinyatakan dengan sebagai berikut :
![R = [ \hat{x}.\hat{y}.\hat{z}]](https://s0.wp.com/latex.php?latex=+R+%3D+%5B+%5Chat%7Bx%7D.%5Chat%7By%7D.%5Chat%7Bz%7D%5D&bg=ffffff&fg=4e4e4e&s=0&c=20201002)
Dimana matrik rotasi R merupakan elemen dari sebuah grup ortogonal 3 dimensi artinya tiap vektor tegak lurus, atau dapat dinyatakan secara matematika :
![R = [ \hat{x}.\hat{y}.\hat{z}]\in SO3](https://s0.wp.com/latex.php?latex=+R+%3D+%5B+%5Chat%7Bx%7D.%5Chat%7By%7D.%5Chat%7Bz%7D%5D%5Cin+SO3&bg=ffffff&fg=4e4e4e&s=0&c=20201002)
Tiap kolom dalam matrix R menyatakan vektor satuan yang nilainya 1. Karena tiap kolom unit vektor satuan adalah ortogonal (tegak lurus), sehingga transport antara tiap kolom akan bernilai 0 atau dapat ditulis :

Matrik rotasi 3 dimensi untuk robot dapat dituliskan sebagai berikut :

Lengan robot tidak hanya bergerak secara rotasi saja, tetapi juga dapat bergerak secara translasi (Prismatic Joint), oleh sebab itu matrik rotasi 3 dimensi dapat diubah menjadi matrik transformasi yang berisikan matrik rotasi dan matrik translasi seperti berikut ini.
Sehingga matrik transformasi lengkap untuk lengan robot dapat dijabarkan sebagai berikut:
Denavit-Hartenberg (DH) parameter robot scara 5 DOF
Sebuah lengan robot tersusun atas gabungan beberapa link dan sendi. Hal ini menyebabkan penyusunan matrik transformasi lengan robot menjadi rumit dan kompleks, semakin banyak link dan sendi lengan robot (atau dapat juga disebut derajat kebebasan (DOF)), maka semakin kompleks matrik transformasi yang dibutuhkan. salah satu metode yang dapat digunakan untuk menyederhanakan penyusunan matrik transformasi ini adalah metode Denavit-Hartenberg (DH – method).
Denavit-Hartenberg (DH) method adalah suatu teknik notasi dan konvensi yang digunakan untuk memodelkan hubungan kinematika antar segmen pada rantai kinematika sebuah robot. Metode ini dinamakan berdasarkan dua insinyur, Jacques Denavit dan Richard Hartenberg, yang memperkenalkannya pada tahun 1955. DH method sangat berguna dalam analisis kinematika dan perencanaan gerakan robot.
Secara umum, DH method menggambarkan setiap segmen atau link pada robot dengan menggunakan empat parameter geometris, yang memberikan deskripsi lengkap tentang orientasi dan posisi relatif antara segmen. Keempat parameter ini adalah:
Panjang link (a)
Panjang sepanjang sumbu zi-1, mengukur jarak dari sumbu zi-1 ke sumbu zi sepanjang garis yang tegak lurus ke kedua sumbu tersebut.

Rotasi pada sumbu Z (
Sudut rotasi sepanjang sumbu zi-1, mengukur rotasi pada sumbu zi-1 dan zi sepanjang garis yang tegak lurus ke keduanya.

Jarak sejajar sumbu (d)
Jarak sepanjang sumbu xi, mengukur jarak dari sumbu xi-1 ke sumbu xi sepanjang garis yang tegak lurus ke kedua sumbu tersebut.

Rotasi pada sumbu X(θ)
Sudut rotasi sepanjang sumbu xi, mengukur rotasi pada sumbu xi-1 dan xi sepanjang garis yang tegak lurus ke keduanya.

Penerapan metode DH melibatkan penempatan suatu koordinat lokal pada setiap sendi atau segmen robot, dan kemudian mendefinisikan transformasi homogen (matriks transformasi) antar koordinat secara berturut-turut. Dengan menggunakan parameter DH, maka dapat ditentukan matriks transformasi untuk menggambarkan perpindahan dan orientasi relatif antar segmen.
Langkah-langkah umum dalam penerapan DH method melibatkan:
- Penentuan sistem koordinat lokal (Frame)
Setiap link atau sendi diberikan suatu sistem koordinat lokal dengan sumbu yang sesuai.
- Menentukan parameter DH
Panjang link (a), rotasi pada sumbu Z (
- Membangun matriks transformasi
Matriks transformasi homogen dihasilkan untuk setiap segmen berdasarkan parameter DH yang telah ditentukan.
- Perkalian Matriks Transformasi
Matriks transformasi untuk setiap segmen dikalikan bersama-sama untuk mendapatkan matriks transformasi total dari dasar robot ke ujung efektor.
DH method memiliki keunggulan karena memungkinkan representasi kinematika yang sederhana dan sistematis, serta memfasilitasi analisis matematis yang mudah. Dengan menggunakan notasi DH, dapat dengan cepat dan efisien melakukan analisis kinematika pada robot, yang sangat penting dalam merancang kontroler gerakan dan perencanaan trayektori pada robot.
Lengan robot SCARA memiliki struktur empat segmen yang dapat didefinisikan menggunakan Denavit-Hartenberg method. Berikut ini penyusunan parameter DH untuk setiap segmen lengan robot SCARA:
Derajat kebebasan dan sistem koordinat lokal tiap-tiap segmen lengan robot SCARA 5 DOF dapat dibuat seperti pada gambar berikut ini:

Gambar 3 DOF dan sistem koordinat lokal untuk tiap link dan sendi pada lengan robot SCARA 5 DOF
Segmen Basis (DOF 0)
a0 = 0 (tidak berpindah pada sumbu Z).
α0 = 0 (berputar pada sumbu Z0).
d0 = l0 (jarak sepanjang sumbu x).
θ0 = 0 (tidak berputar pada sumbu X)
Segmen ulir transfer vertikal (DOF 1)
a1 = Z (berpindah secara vertikal arah sumbu Z yang sama dengan sumbu Z global).
α1 = 0 (tidak berputar pada sumbu Z0).
d1 = 0 (tidak ada jarak sepanjang sumbu x).
θ1 = 0 (tidak berputar pada sumbu X)
Segmen inner arm (DOF 2)
a2 = 0 (tidak berpindah pada sumbu Z).
α2 = 1 (berputar pada sumbu Z2).
d2 = l1( jarak sepanjang sumbu x).
θ2 = 0 (tidak berputar pada sumbu X)
Segmen outer arm (DOF 3)
a3 = 0 (tidak berpindah pada sumbu Z).
α3 = 2 (berputar pada sumbu Z3).
d3 = l2 (jarak sepanjang sumbu x).
θ3 = 0 (tidak berputar pada sumbu X)
Segmen orientasi end effector (DOF 4)
a4 = 0 (tidak memiliki perpanjang arah Z).
α4 = 4 (berputar pada sumbu Z4).
d4 = 0 (tidak ada jarak sepanjang sumbu x).
θ4 = 0 (tidak berputar pada sumbu X)
(Catatan : DOF dihitung mulai dari 0, sehingga untuk 5 DOF mulai dari DOF 0 … DOF 4)
Denavit-Hartenberg Parameter untuk lengan robot SCARA 5 DOF dapat dituliskan pada tabel berikut ini:
| DOF ke n | Rotasi Z (n) | Jarak Z (an) | Jarak X (dn) | Rotasi X (n) |
| DOF 0 | 0 | 0 | l0 | 0 |
| DOF 1 | 0 | Z | 0 | 0 |
| DOF 2 | 1 | 0 | l1 | 0 |
| DOF 3 | 2 | 0 | l2 | 0 |
| DOF 4 | 3 | 0 | 0 | 0 |
Forward Kinematic ( Kinematika Maju )
Pada kinematika maju, perubahan sudut tiap sendi diberikan ke robot dan robot akan bergerak menuju ke titik koordinat tertentu (x, y, z) berdasarkan matrik transformasi yang diberikan ke robot. Secara matematis dapat ditulis :

Berdasarkan parameter Denavit-Hartenberg pada tabel 1, dapat dilihat penentu utama gerak kinematik maju adalah DOF 0, DOF 2, dan DOF 3 sedangkan sudut DOF 4 hanya menentukan arah orientasi end effector, dalam hal ini untuk mempermudah perhitungan arah orientasi end effector bisa diabaikan terlebih dahulu. Gerak translasi hanya terjadi pada DOF 1 yaitu ke arah sumbu Z saja. Diagram benda bebas untuk robot SCARA 5 DOF dapat dilihat pada gambar 4 berikut ini.

Gambar 4 Diagram benda bebas robot dengan 3 link
Dari gambar 4 didapatkan :


atau dapat diuraikan menjadi :


Sudut lengan robot yang digunakan bukan sudut 1′ dan 2′, tetapi sudut 1 dan sudut 2 , hubungan kedua sudut ini adalah :

sehingga persamaan 1 dan 2 dapat ditulis ulang menjadi :


Pada robot Scara, perpindahan pada sumbu Z terjadi secara translasi. Maka dapat ditambahkan perpindahan arah sumbu Z untuk melengkapi persamaan 3 dan 4 menjadi :



Matrix transport forward kinematic untuk robot scara 3 link seperti gambar 4 dapat disusun :

Matrik di atas adalah matrik transport forward kinematik untuk robot Scara dengan 3 link. l0, l1, dan l2 adalah panjang link yang menghubungkan sendi-sendi robot, panjang link ini konstan. Sedangkan (x, y, z) adalah koordinat ruang ujung lengan robot. Dengan memasukkan nilai sudut tiap lengan robot, maka robot akan melakukan gerakan menuju titik (x, y, z).
Inverse Kinematic ( Kinematika Mundur )
Pada inverse kinematic, titik koordinat tujuan (x, y, z) sudah diketahui. Untuk menggerakkan lengan robot menuju ke titik (x, y, z) maka sudut – sudut lengan robot (



Dengan menggunakan persamaan trigonometri sederhana dapat dihitung ketiga sudut lengan robot tersebut. Namun untuk lengan robot yang memiliki banyak segmen dan sendi, perhitungan dengan hanya menggunakan metode trigonometri akan memberikan banyak solusi. Terdapat 2 pendekatan inverse kinematic yang dapat digunakan.

Gambar 5 dua solusi inverse kinematic
Metode closed-form sangat handal untuk digunakan pada sistem yang memiliki segmen kurang tidak lebih dari 2 segmen. Jika segmen lebih dari 2 maka solusi Optimization Solution menjadi pilihan yang lebih tepat. Solusi lain adalah dengan memberikan kondisi batas pada sudut tertentu sehingga segmen dapat dikurangi di dalam perhitungan. Namun dengan pemberian kondisi batas ini akan mengurangi fleksibilitas gerak robot.
Inverse kinematic untuk robot SCARA dengan 2 segmen (inner arm dan outer arm)
Diagram benda bebas untuk lengan robot SCARA dengan 2 segmen dapat dilihat pada gambar 6 berikut ini.

Gambar 6 diagram benda bebas untuk lengan robot SCARA 2 segmen
Matrik transformasi forward kinematic untuk gambar 6 adalah :

Makapersamaan inverse kinematic dapat ditulis :

Dari gambar 6, panjang R dapat dihitung dengan menggunakan rumus Pythagoras :

Besar sudut adalah:

Besar sudut adalah :

Maka sudut



Sudut

Nilai sudut


Maka nilai sudut


Persamaan di atas adalah solusi pertama invers kinematik, solusi kedua adalah sebagai berikut :
Diketahui :





 )
)Persamaan di atas adalah solusi kedua, maka solusi invers kinematik untuk robot SCARA dengan 2 segmen dapat disimpulkan sebagai berikut :
Solusi pertama:
Solusi kedua :
)Inverse kinematic untuk robot SCARA dengan 3 segmen (Base, Inner Arm dan Outer Arm)
Diagram benda bebas untuk lengan robot SCARA dengan 3 segmen dapat dilihat pada gambar 7 berikut ini.

Gambar 7 diagram benda bebas untuk robot SCARA 3 segmen
Matrik transformasi forward kinematic untuk gambar 7 adalah :


Makapersamaan inverse kinematic dapat ditulis :

Dari persamaan inverse kinematic untuk robot SCARA dengan 3 segmen terdapat 3 sudut kontrol yaitu
Titik koordinat B (xB, yB) dapat dihitung :


maka dengan menggunakan solusi inverse kinematik robot dengan 2 segmen dapat diturunkan persamaan invers kinematik untuk robot dengan 3 segmen yaitu :
Solusi pertama:


Solusi kedua :
 )
)Hasil solusi pertama dan solusi kedua inverse kinematic untuk robot SCARA 3 segmen mengandung 2 persamaan dengan 3 variabel yang tidak diketahui. Penyelesaian akhir terbaik dapat dilakukan dengan menggunakan pendekatan metode numerik.
Membuat rangkaian gerbang logika dasar NOT, AND dan OR dengan menggunakan transistor saja
Saya lagi males mengarang narasi, jadi lihat saja gambarnya dan langsung buat rangkaiannya ya…… 😀
1. Rangkaian transistor untuk gebang logika AND
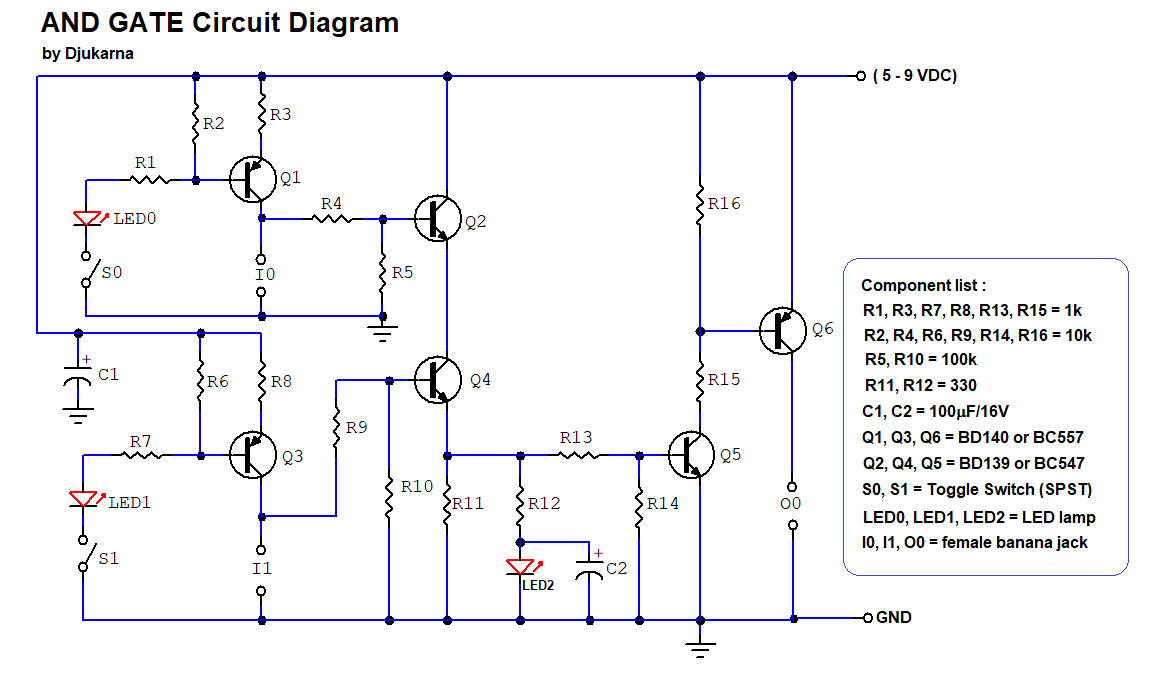
Berikut contoh rangkaian di breadboard

2. Rangkaian transistor untuk gebang logika OR
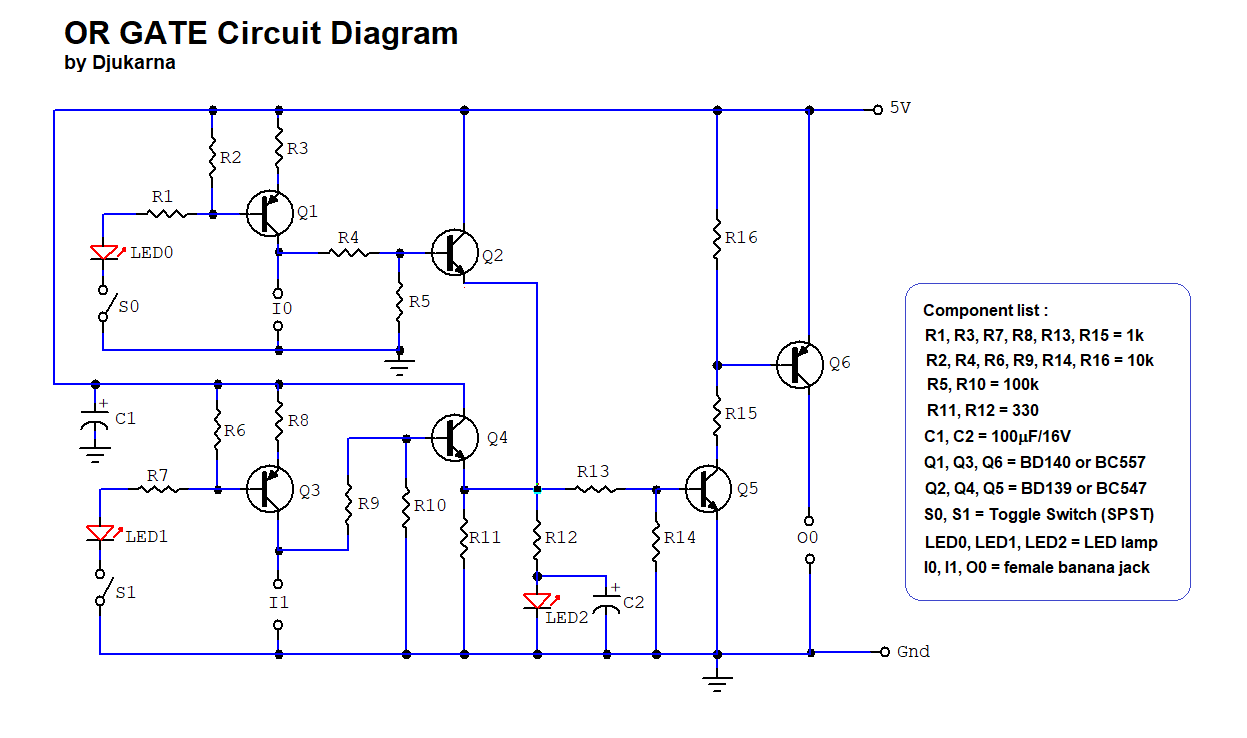
Berikut contoh rangkaian di breadboard

3. Rangkaian transistor untuk gebang logika NOT
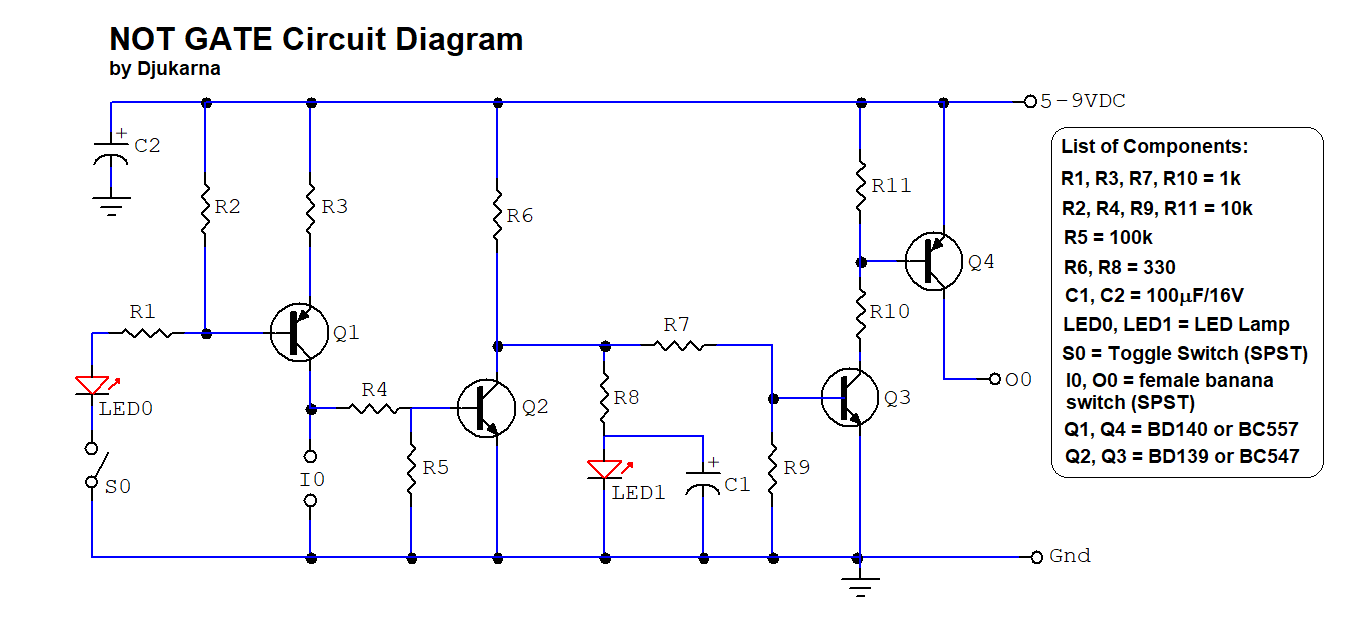
Berikut contoh rangkaian di breadboard
Metode Peta Karnaugh (K-MAP)
Karnaugh Map Method (metode peta Karnaugh ) adalah metode untuk menyederhanakan persamaan aljabar Boolean. Metode ini pertama kali diperkenalkan oleh Maurice Karnaugh pada tahun 1953 yang merupakan penyederhanaan dari metode Veitch Chart (Kartu Veitch).
Langkah-langkah menggunakan metode peta Karnaugh adalah sebagai berikut
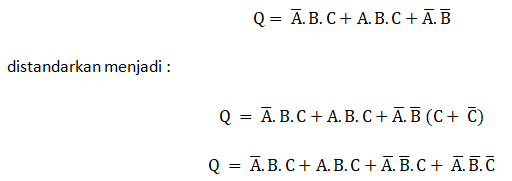
1. Pastikan terlebih dahulu persamaan Boolen berada dalam bentuk standar. Dalam hal ini saya menggunakan standar SOP (Sum Of Product).
Contoh :
2. Susun tabel kebenaran untuk persamaan di atas
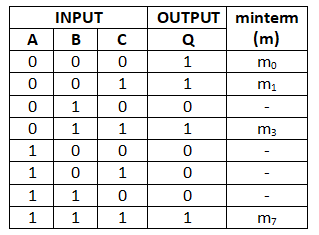
3. Buat peta Karnaugh dengan jumlah kotak 2n dengan n = banyaknya variabel. Dari contoh di atas, terdapat 3 variabel sehingga kotak peta Karnaugh adalah 23 = 8 kotak. Dan masukkan minterm (m) dari tabel kebenaran ke dalam kotak yang sesuai.
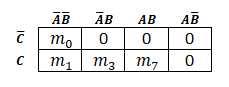
4. Buat loop atau kelompok pada minterm-minterm yang berdekatan dengan banyaknya anggota kelompok 1, 2, 4, 8 atau 16 supaya dapat dihilangkan minterm yang berlawanan.
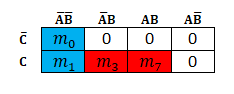
Pada tabel Karnaugh di atas terdapat kelompok dengan 2 anggotam minterm yaitu kelompok biru dan kelompok merah. Masing-masing kelompok beranggotakan 2 minterm. Maka persamaan minimum dapat diperoleh dari gabungan minterm yang ada pada tiap-tiap kelompok yaitu :
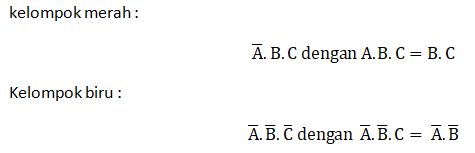
5. Tulis ulang bentuk minimum dari persamaan aljabar Boolean yaitu :
![]()
6. Buat rangkaian digital dengan menggunakan persamaan minumum pada no 5
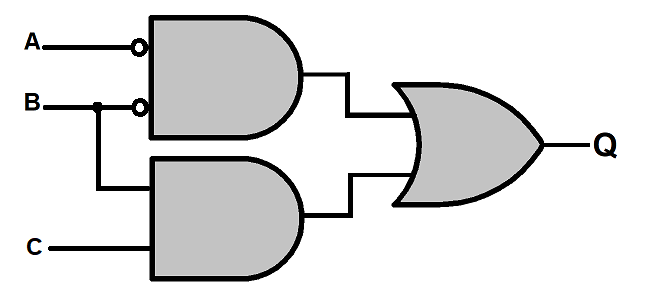
Gambar 1 rangkaian digital untuk persamaan no 5
Metoda peta Karnaugh sangat berguna dan efektif untuk mendesain rangkaian digital terutama untuk rangkaian-rangkaian digital dengan banyak variabel.
Teorema Aljabar Boolean & Rangkaian NOR dan NAND sebagai pengganti NOT, OR dan AND
Aljabar Boolean adalah salah satu cabang dari ilmu aljabar yang dipelajari di matematika ajlabar. Aljabar Boolean pertama kali diperkenalkan oleh seorang ahli matematika Inggris yang bernama George Boole (2 November 1815 – 8 December 1864) dalam tulisannya yang berjudul An Investigation of Law of Thought pada tahun 1854.
Aljabar Boolean menggunakan nilai 1 dan 0 sebagai input dan output. Nilai 0 dan 1 ini sesuai dengan sistem bilangan biner. Aljabar Boolean merupakan dasar dalam mendesain rangkaian digital dan digunakan pada peralatan komputasi moderen saat ini.
Dalam rangkaian elektronika digital, kondisi “1” dinyatakan dengan tegangan 5V dan kondisi “0” dinyatakan dengan tegangan 0V atau dapat juga dengan kondisi OFF sebagai logika “0” dan ON sebagai logika “1”.
Terdapat 2 jenis teorema di dalam aljabar Boolean yaitu teorema variabel tunggal dan teorema variabel jamak.
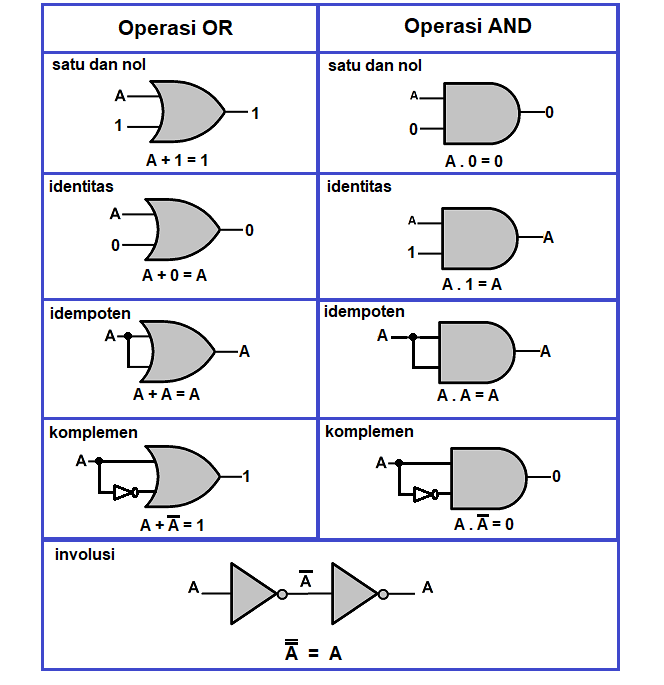
Teorema Variabel Tunggal
Teorema variabel tunggal diturunkan dari operasi logika dasar OR, AND dan NOT, tabel berikut ini menunjukkan teorema variabel tunggal aljabar Boolean.
Teorema Variabel Jamak
Teorema variabel jamak umumnya sama dengan teoerama pada aljabar biasa. Teorema variabel jamak dapat dilihat pada tabel berikut ini.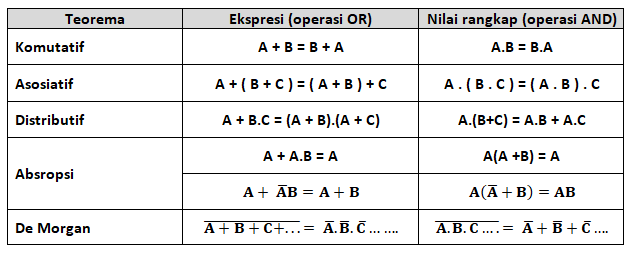
Gerbang NOR dan NAND bersifat universal, artinya gerbang NOR dan NAND dapat dirangkai untuk menyusun semua gerbang logika. Berikut rangkaian gerbang NOR dan NAND untuk membentuk rangkaian – rangkaian logika NOT, AND dan OR.
1. Rangkaian logika NOT yang dibentuk dari gerbang logika NOR dan NAND
Gambar rangkaian dibawah ini menunjukkan logika NOT yang dibentuk oleh gerbang NOR dan NAND
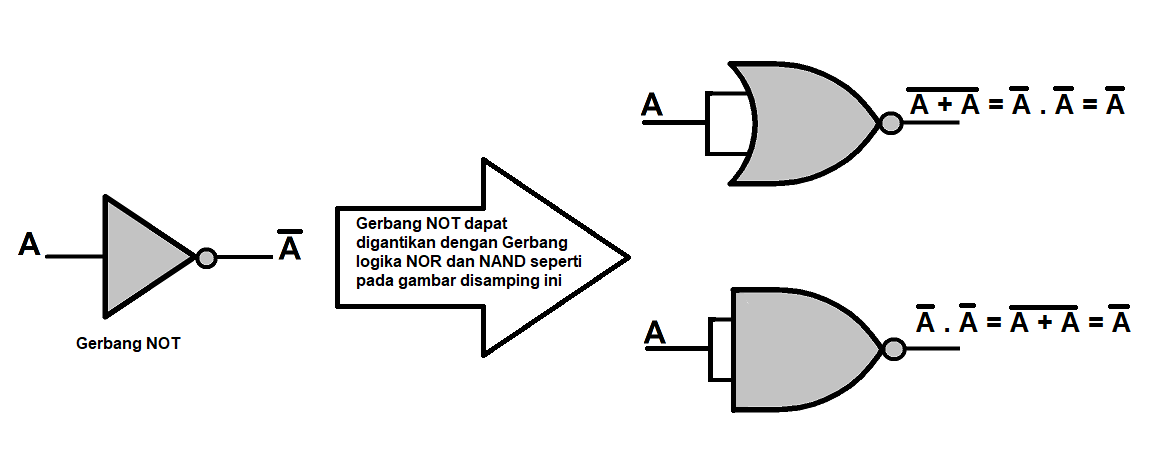
Gambar 1 gerbang logika NOT diganti dengan gerbang logika NAND atau gerbang logika NOR
2. Rangkaian logika OR yang dibentuk dari gerbang logika NOR dan NAND
Gambar rangkaian dibawah ini menunjukkan logika OR yang dibentuk oleh gerbang NOR dan NAND.
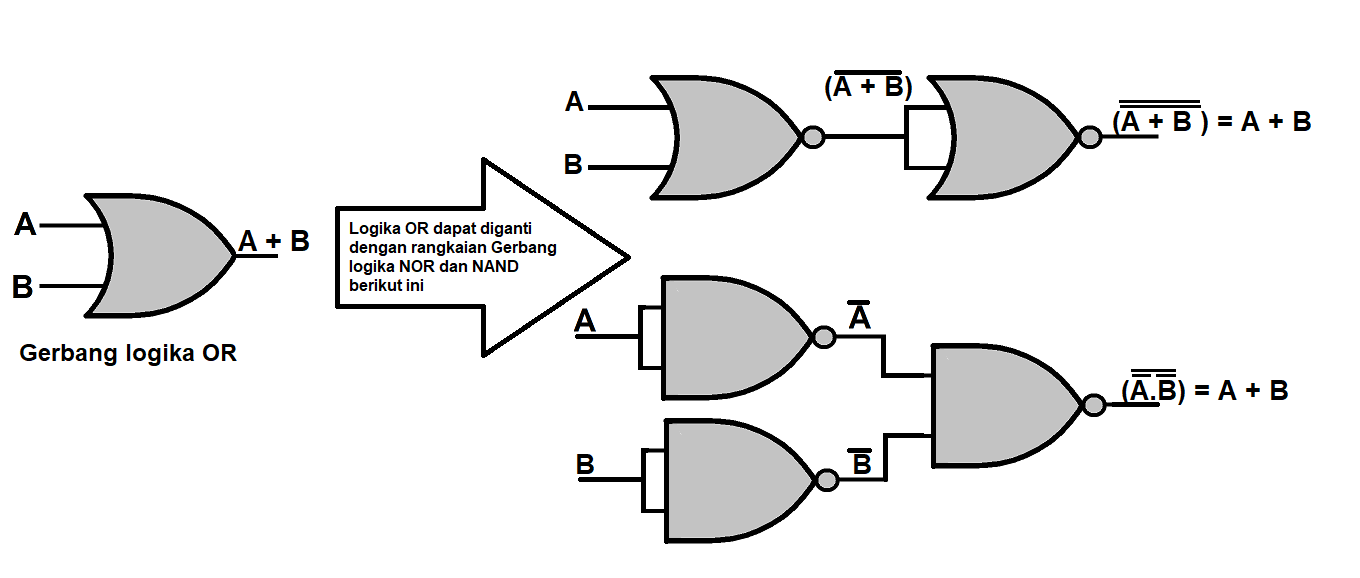
Gambar 2 gerbang logika OR diganti dengan rangkaian gerbang logika NOR atau gerbang logika NAND
3. Rangkaian logika AND yang dibentuk dari gerbang logika NOR dan NAND
Gambar rangkaian dibawah ini menunjukkan logika AND yang dibentuk oleh gerbang NOR dan NAND.
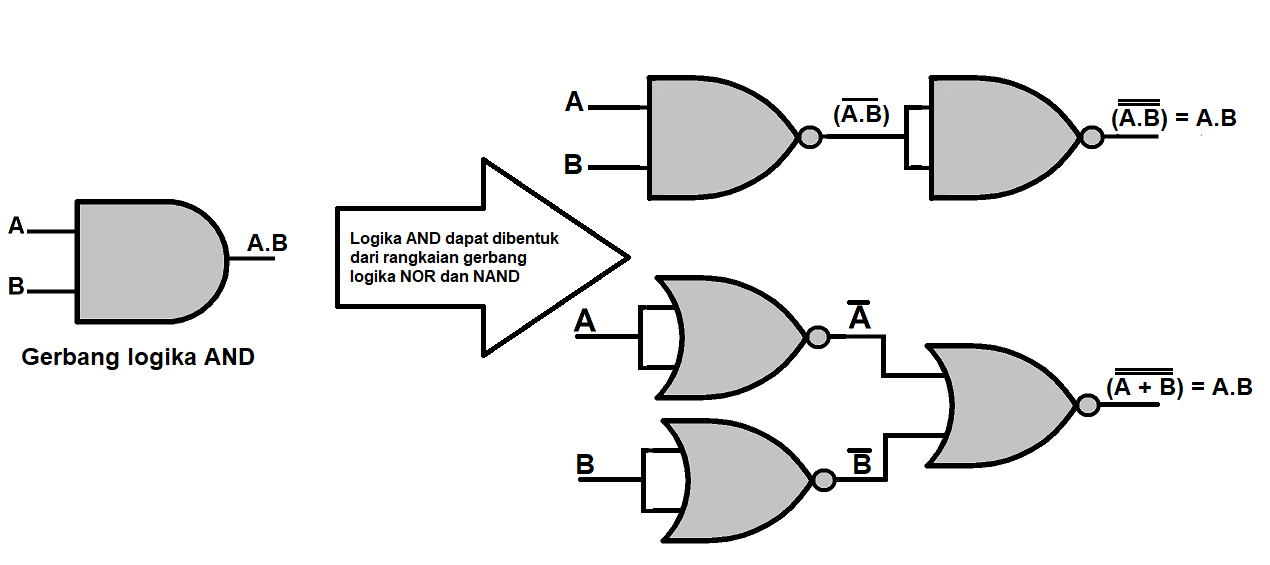
Gambar 3 gerbang logika AND diganti dengan rangkaian gerbang logika NAND atau gerbang logika NOR
Gerbang Ex-OR dan Ex-NOR
Gerbang logika Ex-OR dan Ex-NOR adalah gerbang logika yang dibuat khusus, sehingga disebut Exclusive OR atau disingkat Ex-OR dan Exclusive NOR atau disingkat Ex-NOR.
Gerbang Ex-OR (Exclusive OR)
Gerbang Ex-OR adalah kombinasi dari gerbang-gerbang logika yang komplek yang digunakan untuk membentuk rangkaian logika aritmatika, komparator dan rangkaian untuk mendeteksi error.
Gerbang logika Ex-OR disimbolkan seperti pada gambar berikut ini.
Gambar 1 simbol gerbang logika Ex-OR
Dalam bentuk aljabar Boolean, logika Ex-OR dapat dituliskan seperti berikut ini.
![]()
atau dapat juga aljabar boolean untuk Ex-OR dijabarkan sebagai berikut ini:
![]()
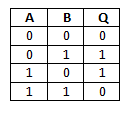
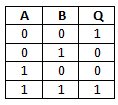
Tabel kebenaran untuk logika Ex-OR adalah
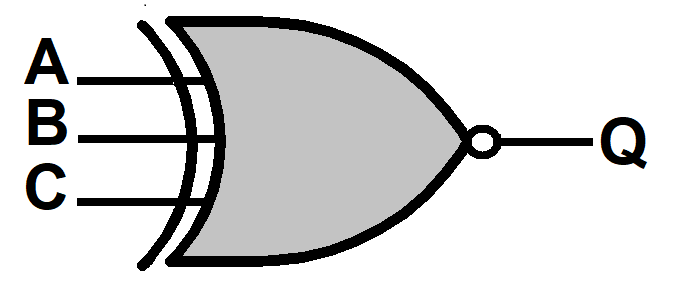
Selain mempunyai 2 input, gerbang logika Ex-OR juga ada yang memiliki 3 input variabel. Simbol gerbang logika dengan 3 input variabel dapat dilihat seperti pada gambar berikut ini.
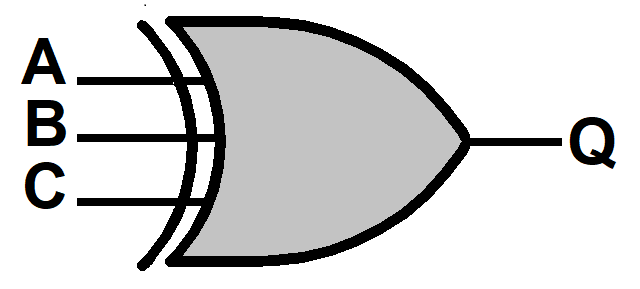
Gambar 2 simbol gerbang logika Ex-OR dengan 3 input variabel
Aljabar Boolean untuk Ex-OR dengan 3 input variabel dapat ditulis sebagai berikut
![]()
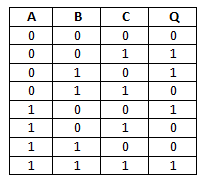
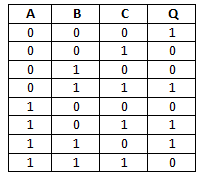
Tabel kebenaran untuk logika Ex-OR dengan 3 input variabel dapat dibuat sebagai berikut ini.
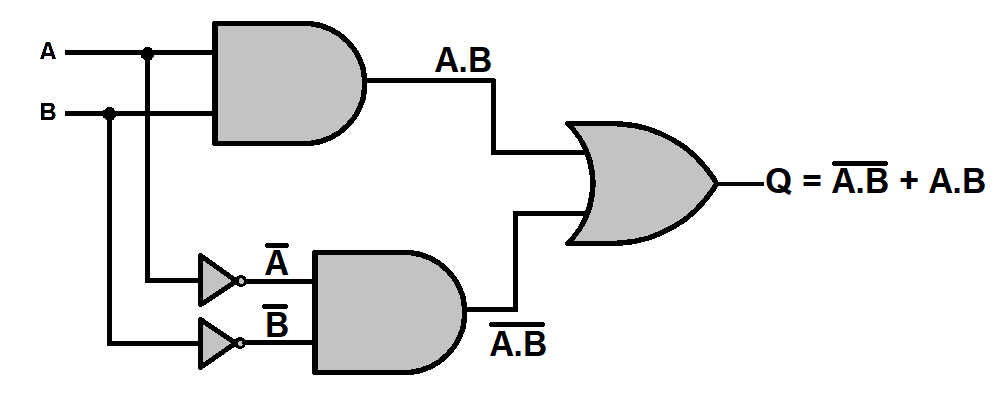
Gerbang logika Ex-OR dapat juga disusun dari gerbang – gerbang logika dasar. Berikut ini ekuivalensi logika Ex-OR yang dibentuk dengan menggunakan gerbang AND, OR dan NAND.
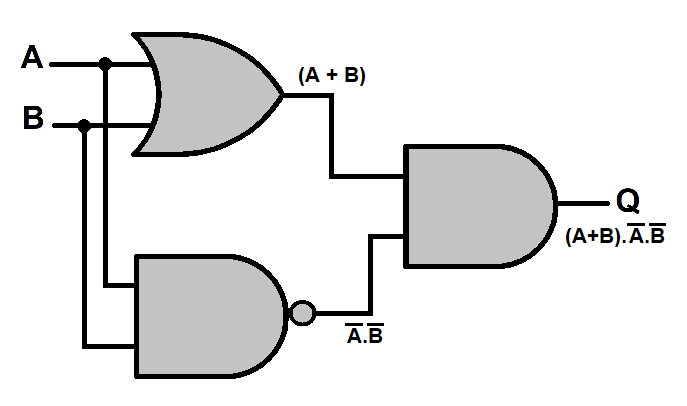
Gambar 3 logika Ex-OR yang dibuat dari gerbang logika OR, AND dan NAND
Output dari gambar 3 dapat disederhanakan sebagai berikut
![]()
dengan mengikuti aturan De Morgan yaitu ![]() , maka didapat
, maka didapat
Di mana ![]() , maka di dapat:
, maka di dapat:
![]()
Gerbang logika Ex-OR juga dapat dibentuk dari gerbang logika NAND saja yaitu :
Gambar 4 logika Ex-OR yang dibentuk dari gerbang logika NAND saja
Gerbang logika Ex-OR biasanya digunakan untuk membuat rangkaian operasi aritmatika dan perhitungan khusus Adder dan Half-Adder. Gerbang logika Ex-OR dapat berfungsi sebagai “carry-bit” atau sebagai kontroller inverter, di mana salah satu input melewatkan data biner dan input lainnya berfungsi sebagai pemberi signal kontrol.
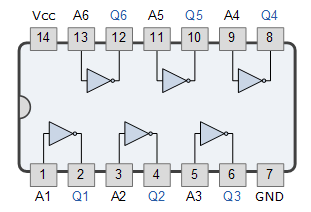
IC gerbang logika Ex-OR antara lain :
- IC TTL seri 74LS86 Quad 2 input Ex-OR
- IC CMOS seri 4030 Quad 2 input EX-OR
Konfigurasi kaki IC-IC tersebut dapat dilihat seperti pada gambar berikut ini.
Gambar 5 konfigurasi pin IC 74LS86 dan 4030 quad 2 input Ex-OR
Gerbang Logika Ex-NOR
Gerbang logika Ex-NOR adalah gabungan gerbang logika Ex-OR dengan gerbang logika NOT.
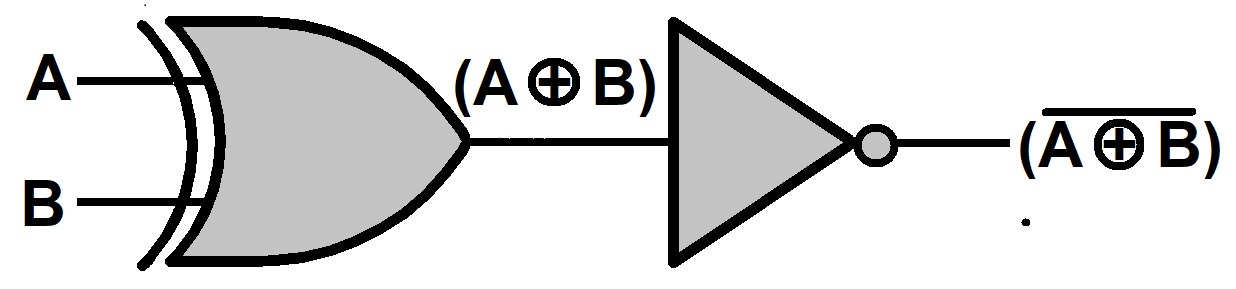
Gambar 6 gabungan gerbang logika Ex-OR dan gerbang logika NOT membentuk logika Ex-NOR
Gerbang logika Ex-NOR disimbolkan seperti pada gambar berikut ini

Gambar 7 gabungan gerbang logika Ex-NOR
Aljabar boolen untuk gerbang logika Ex-NOR dapat ditulis sebagai berikut :
![]()
Tabel kebenaran untuk logika Ex-NOR adalah :
Sama hal nya dengan gerbang logika Ex-OR, gerbang logika Ex-NOR juga ada yang memiliki 3 input variabel seperti pada gambar berikut ini.
Gambar 8 simbol gerbang logika Ex-NOR dengan 3 input
Aljabar Boolean untuk gerang logika Ex-NOR dengan 3 input variabel adalah :
![]()
Maka tabel kebenaran untuk logika Ex-NOR dapat dibuat seperti berikut ini.
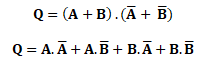
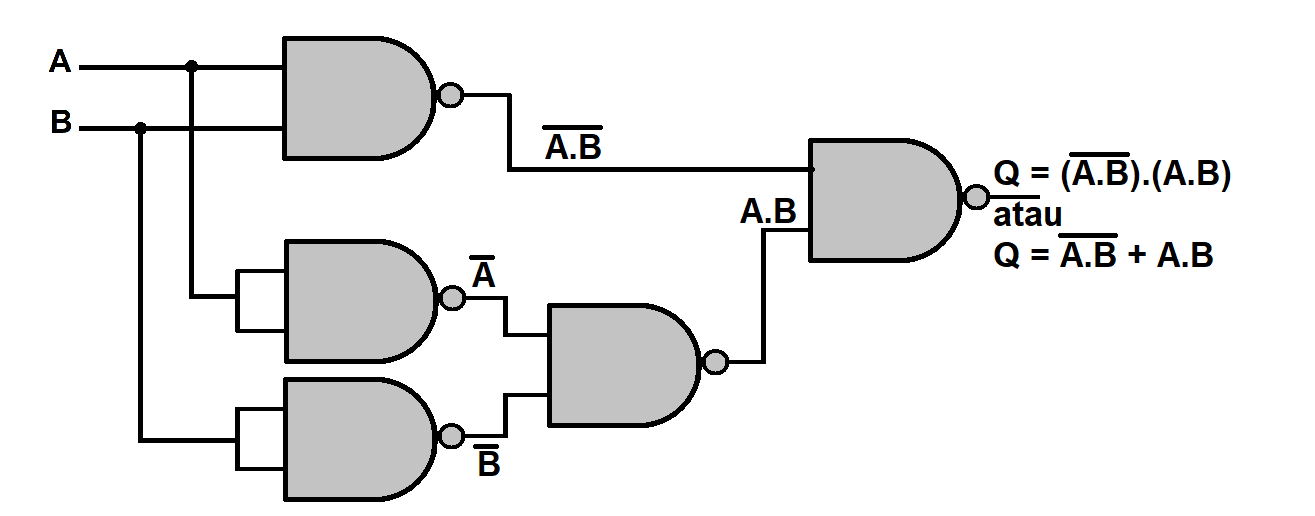
Sama halnya dengan gerbang logika Ex-OR, gerbang logika Ex-NOR juga dapat dirangkai dengan menggunakan gerbang-gerbang logika dasar. Salah satunya dapat dilihat pada gambar berikut ini.
Gambar 9 rangkaian logika yang dibentuk dari gerbang logika NOT, OR dan AND untuk membentuk logika Ex-NOR
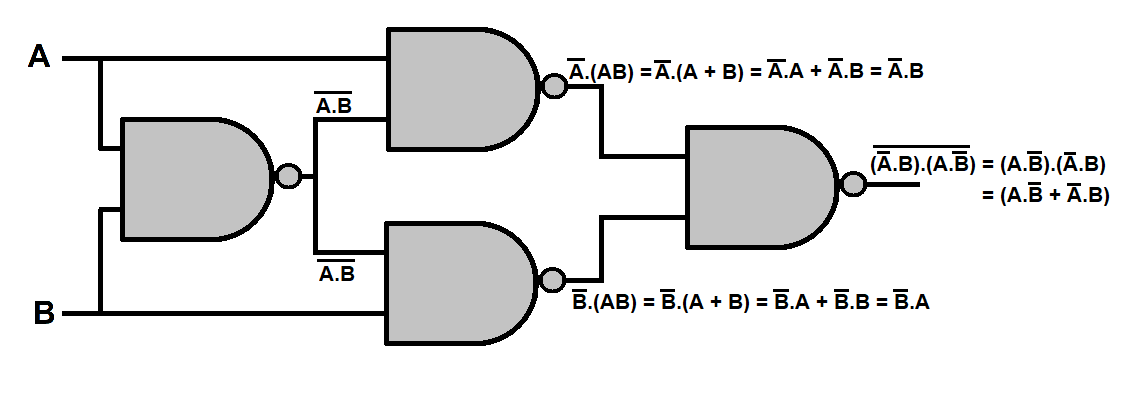
Gambar 9 terlihat sebuah rangkaian gerbang logika AND, OR dan NOT untuk membentuk sebuah logika Ex-NOR. Selain itu, logika Ex-NOR dapat juga dibentuk dengan hanya menggunakan gerbang logika NAND saja yaitu :
Gambar 10 rangkaian gerbang logikan NAND untuk membentuk logika Ex-NOR
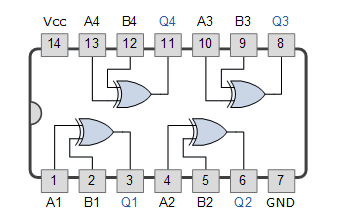
Gerbang logika Ex-NOR digunakan untuk membentuk rangkaian operasi artimatika dan mengecek data seperti ADDERS, SUBTRACTORS atau PARITY CHECKERS. Gerbang logika EX-NOR dapat juga digunakan untuk rangkaian Digital Comparator. IC-IC yang merupakan gerbang logika EX-NOR antara lain:
- IC TTL seri 74LS66 quad 2 input Ex-NOR
- IC CMOS seri 4077 quad 2 input Ex-NOR
Konfigurasi kaki kaki IC Ex-NOR dapat dilihat pada gambar berikut ini.
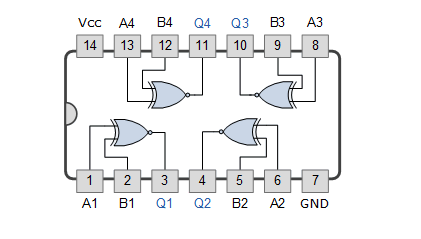
Gambar 11 konfigurasi pin untuk IC 74LS66 dan 4077
Gerbang logika NAND dan NOR
Gerbang Logika NOR
Gerbang logika NOR merupakan gerbang logika gabungan OR dan NOT, sehingga outputnya merupakan kebalikan dari output gerbang logika OR. Gerbang logika NOR disimbolkan sebagai berikut.

Gambar 1 simbol gerbang logika NOR

Gambar 2 gerbang logika NOR merupakan gabungan gerbang logika OR dengan gerbang logika NOT
Persamaan Boolean untuk gerbang logika NOR dapat dituliskan sebagai berikut.
![]()
Sedangkan tabel kebeneran untuk gerbang logika NOR adalah
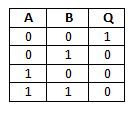
Logika NOR juga dapat dibuat dengan menggunakan rangkaian saklar. Gambar berikut ini menunjukkan rangkaian saklar yang bekerja berdasarkan logika NOR.
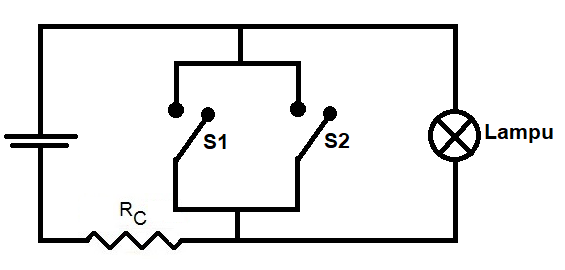
Gambar 3 rangkaian saklar untuk logika NOR
Pada gambar 3 terdapat 2 buah saklar yang dirangkai secara paralel dengan lampu dan sumber tegangan. Terdapat juga satu buah resistor Rc yang dirangkai seri dengan sumber tegangan dan saklar. Ketika kedua saklar dalam kondisi terbuka (logika “0”), maka lampu akan menyala (logika “1”), tetapi ketika salah satu atau kedua saklar ditutup (logika “1”), maka lampu akan padam (logika “0”). Kondisi ini sama dengan logika NOR. Selain dapat dibuat dengan menggunakan rangkaian saklar, logika NOR juga dapat dibuat dengan mengggunakan rangkaian transistor. Gambar berikut ini menunjukkan rangkaian transistor yang bekerja sesuai dengan logika NOR.
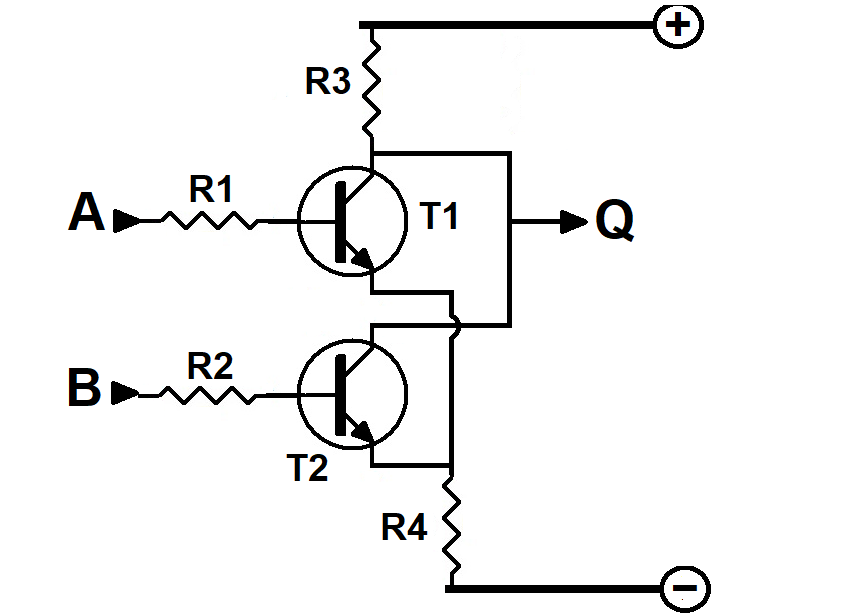
Gambar 4 rangkaian transistor yang bekerja sesuai logika NOR
Rangkaian transistor pada gambar 4 bekerja berdasarkan logika NOR. R1 dan R2 berfungsi untuk membatasi arus listrik yang masuk ke kaki basis, R3 Berfungsi untuk membatasi arus yang masuk ke kaki kolektor kedua transistor, R4 adalah optional, boleh digunakan boleh juga tidak digunakan. output diambil dari kaki kolektor kedua transistor T1 dan T2. Pada saat pin input A dan pin input B tidak diberikan tegangan (logika “0”), maka transistor tidak aktif sehingga arus tidak dapat mengalir melewati transistor, akibatnya output Q akan mendapatkan tegangan dari resistor R3 dan bernilai “1”. Ketika pin A atau pin B atau kedua pin A dan B mendapatkan tegangan (logika “1”), maka transistor akan aktif dan mengalirkan arus listrik dari kolektor ke emitor, akibatnya output Q akan turun menjadi “0”. Cara kerja ini sama dengan logika NOR.
Komponen IC NOR antara lain :
- IC TTL tipe 74LS02, 74LS27, 74LS60
- IC CMOS tipe CD4001, CD4025, CD4002
Berikut ini beberapa contoh konfigurasi kaki IC gerbang logika NOR.
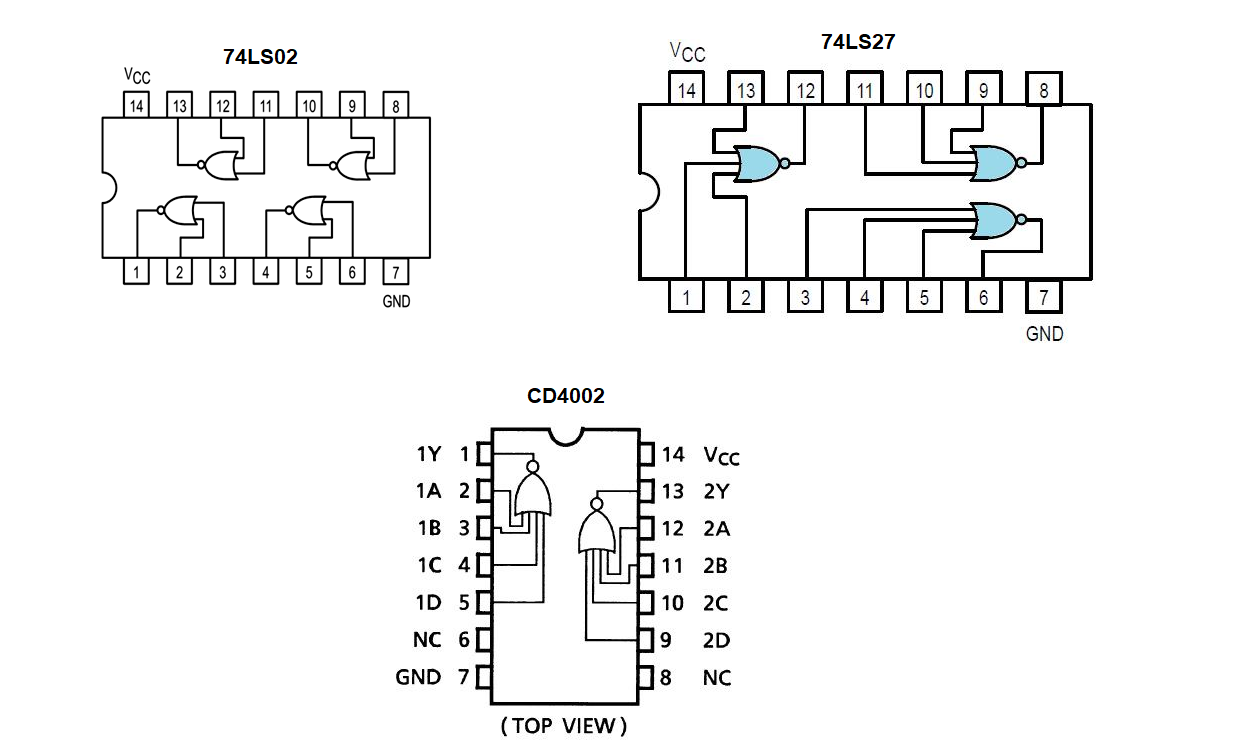
Gambar 5 konfigurasi pin IC gerbang logika NOR
Konfigurasi pin gerbang logika NOR untuk lebih jelas dan lengkapnya dapat dilihat pada datasheet IC gerbang logika masing-masing.
Gerbang Logika NAND
Gerbang logika NAND merupakan gerbang logika gabungan AND dan NOT, sehingga outputnya merupakan kebalikan dari output gerbang logika AND. Gerbang logika AND disimbolkan sebagai berikut.
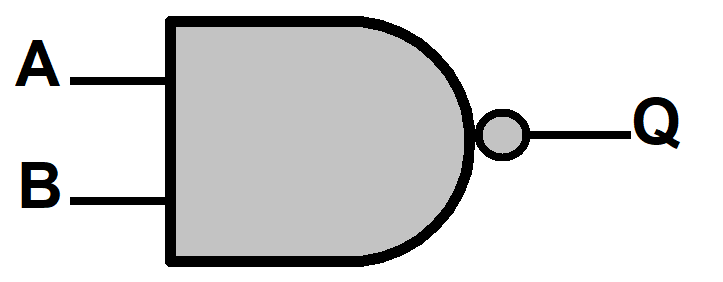
Gambar 6 simbol gerbang logika NOR

Gambar 7 gerbang logika NAND merupakan gabungan gerbang logika AND dengan gerbang logika NOT
Persamaan Boolean untuk gerbang logika NAND dapat dituliskan sebagai berikut .
![]()
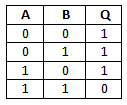
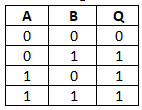
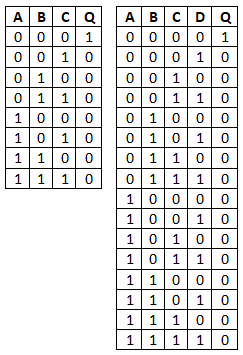
Sedangkan tabel kebeneran untuk gerbang logika NAND adalah
Logika NAND juga dapat dibuat dengan menggunakan rangkaian saklar. Gambar berikut ini menunjukkan rangkaian saklar yang bekerja berdasarkan logika NAND.
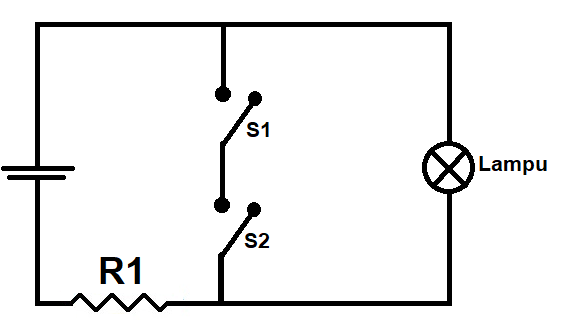
Gambar 8 rangkaian saklar untuk logika NAND
Pada gambar 8 terdapat 2 buah saklar yang dirangkai secara seri dan dirangkai secara paralel dengan lampu. Terdapat juga satu buah resistor R1 yang dirangkai seri dengan sumber tegangan dan saklar. Ketika kedua saklar atau salah satu saklar dalam kondisi terbuka (logika “0”), maka lampu akan menyala (logika “0”), tetapi ketika kedua saklar ditutup (logika “1”), maka lampu akan padam (logika “0”). Kondisi ini sama dengan logika NAND. Selain dapat dibuat dengan menggunakan rangkaian saklar, logika NAND juga dapat dibuat dengan mengggunakan rangkaian transistor. Gambar berikut ini menunjukkan rangkaian transistor yang bekerja sesuai dengan logika NAND.
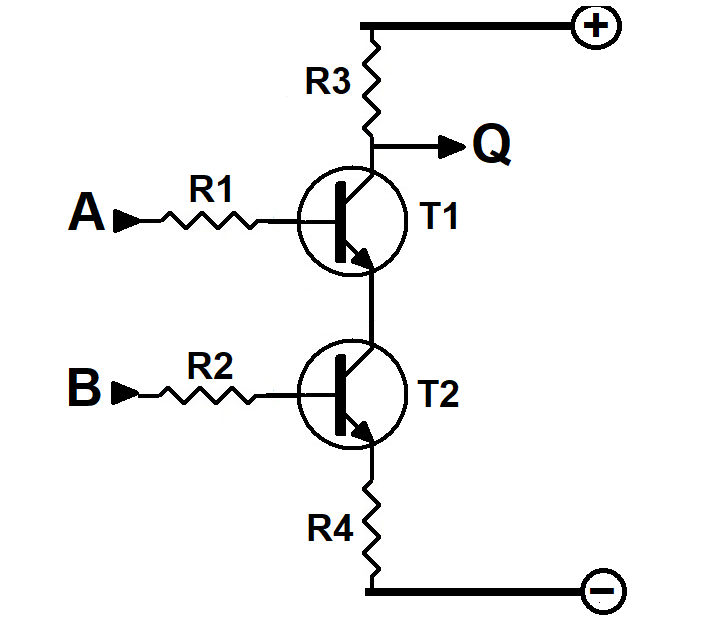
Gambar 9 rangkaian transistor yang bekerja sesuai logika NAND
Rangkaian transistor pada gambar 8 bekerja berdasarkan logika NAND. R1 dan R2 berfungsi untuk membatasi arus listrik yang masuk ke kaki basis, R3 Berfungsi untuk membatasi arus yang masuk ke kaki kolektor transistor, R4 adalah optional, boleh digunakan boleh juga tidak digunakan. output diambil dari kaki kolektor kedua transistor T1. Pada saat pin input A dan pin input B tidak diberikan tegangan (logika “0”), maka transistor tidak aktif sehingga arus tidak dapat mengalir melewati transistor, akibatnya output Q akan mendapatkan tegangan dari resistor R3 dan bernilai “1”. Ketika pin A dan pin B mendapatkan tegangan (logika “1”), maka transistor akan aktif dan mengalirkan arus listrik dari kolektor ke emitor, akibatnya output Q akan turun menjadi “0”. Cara kerja ini sama dengan logika NAND.
Komponen IC NAND antara lain :
- IC TTL tipe 74LS00, 74LS10, 74LS20, 74LS30
- IC CMOS tipe CD4011, CD4023, CD4012
Berikut ini konfigurasi pin beberapa IC gerbang logika NAND
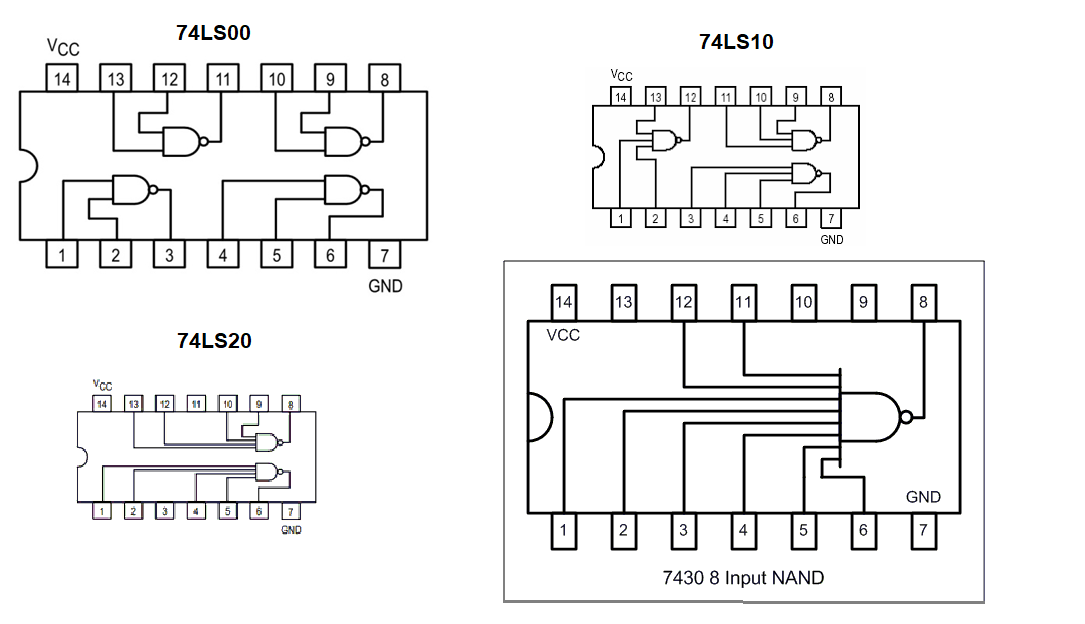
Gambar 10 konfigurasi pin IC NAND
Konfigurasi pin IC gerbang-gerbang logika dapat dilihat lebih lengkap di datasheet IC tersebut.

Gerbang-Gerbang Logika Dasar
Gerbang Logika OR
Gerbang logika OR akan memberikan output bernilai 1 jika salah satu inputnya atau lebih bernilai 1. Gerbang logika OR disimbolkan dengan gambar seperti berikut ini.

Gambar 1 simbol gerbang logika OR
Cara kerja gerbang logika OR dapat didefinikan “Jika A atau B bernilai benar maka Q akan bernilai benar”. Tabel kebenaran gerbang logika OR sebagai berikut.
Tabel 1 logika OR
Ekspresi persamaan Boolean untuk logika OR adalah :
Q = A + B
Pada ekspresi persamaan Boolean di atas, tanda + tidak dibaca tambah, tetapi dibaca “or” atau “atau”. Cara membacanya “Output Q sama dengan input A atau input B”. Artinya output Q akan selalu bernilai “1” selama salah satu inputnya bernilai “1” dan hanya akan bernilai “0” jika kedua input bernilai “0”.
Logika OR juga dapat dibentuk dari rangkaian 2 buah saklar yang dipasang secara paralel seperti pada gambar berikut.
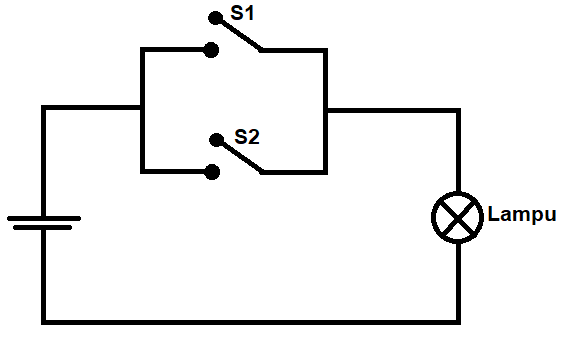
Gambar 2 rangkaian saklar untuk membuat logika OR
Pada gambar 2 terdapat dua buah saklar S1 dan S2 yang dirangkai secara paralel dan diserikan dengan satu buah lampu dan satu buah sumber tegangan. Lampu akan padam jika kedua saklar (S1 dan S2) terbuka (bernilai”0″) dan akan menyalah jika salah satu atau kedua-dua saklar tertutup (bernilai “1”). Selain dengan menggunakan saklar, rangkaian logika OR juga dapat dibuat dengan menggunakan transistor. Gambar berikut ini menunjukan rangkaian sederhana transistor yang bekerja sebagai logika OR.
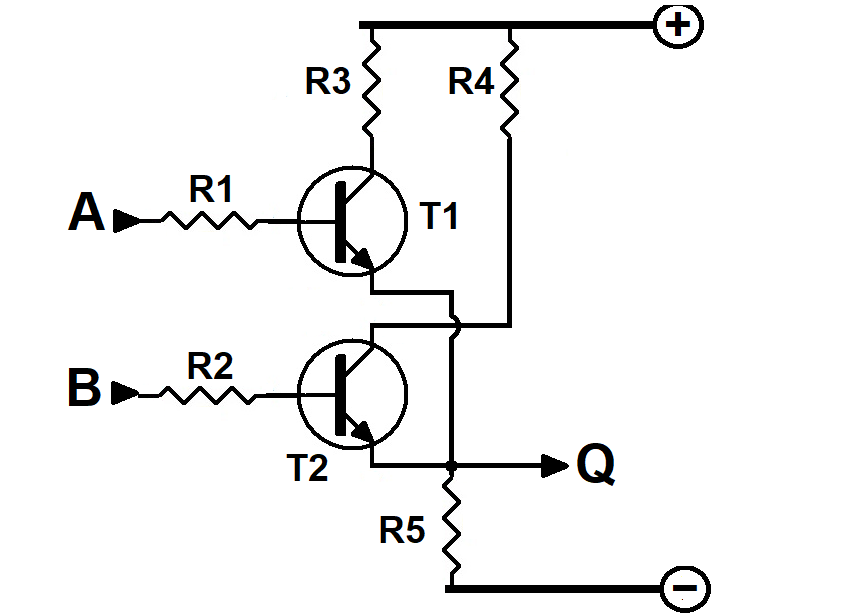
Gambar 3 rangkaian transistor untuk logika OR
Gambar 3 menunjukkan 2 buah rangkaian transistor yang dirangkai sebagai saklar. pin A dan pin B berfungsi sebagai input sedangkan pin Q berfungsi sebagai output. R1 dan R2 berfungsi untuk membatasi arus listrik yang masuk kaki basis transistor, R3 dan R4 berfungsi sebagai pembatas arus listrik yang masuk ke kaki kolektor transistor. sedangkan R5 berfungsi sebagai beban. Ketika pin A dan pin B tidak dihubungkan dengan sumber tegangan (berlogika “0”) maka kedua transistor tidak akan aktif sehingga arus listrik tidak dapat mengalir melewati transistor. Akibatnya pin Q akan bernilai rendah (logika “0”). Jika pin A mendapatkan tegangan, maka transistor T1 akan aktif dan menjadi jenuh sehingga arus listrik dapat mengalir melewati transistor T1 dan mengakibatkan pin Q akan bernilai tinggi (berlogika “1”). Demikian juga dengan pin B, jika pin B diberikan tegangan (berlogika “1”) maka transistor T2 akan jenuh sehingga dapat mengalirkan arus listrik dan mengakibatkan pin Q bernilai tinggi.
Jadi pin Q hanya akan bernilai rendah jika kedua pin input A dan B bernilai rendah. Pin Q akan bernilai tinggi jika salah satu atau kedua pin A dan pin B bernilai tinggi.
Gerbang-gerbang logika dapat ditemui dipasaran dalam bentuk chip atau IC. berikut ini adalah IC untuk gerbang logika OR.
- IC dari keluarga TTL : 74LS32 quad 2 input OR GATE
- IC dari keluarga CMOS : CD4071 quad 2 input OR GATE
- IC dari keluarga CMOS : CD4075 Tripe 3 input OR GATE
- IC dari keluarga CMOS : CD4072 Dual 4 input OR GATE
Gambar konfigurasi kaki IC – iC tersebut dapat dilihat pada gambar berikut:
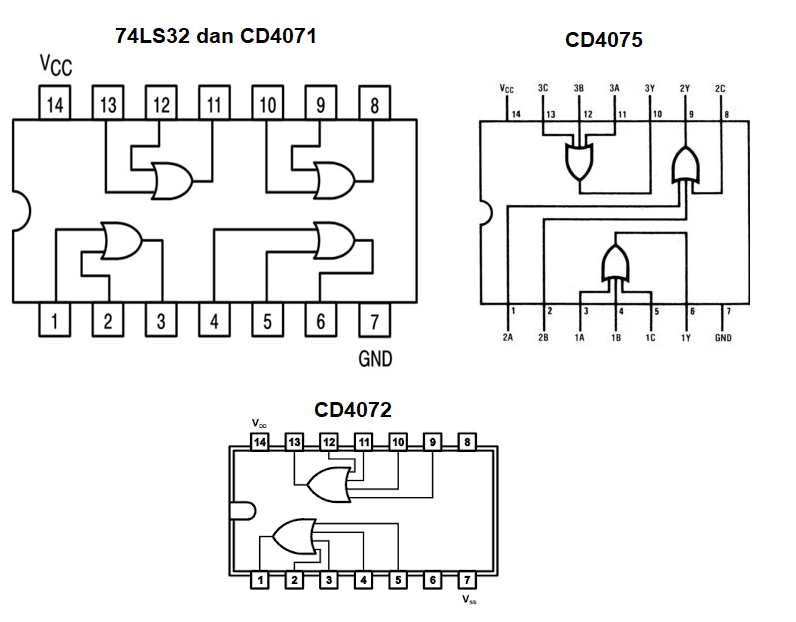
Gambar 4 konfigurasi pin IC – IC gerbang logika OR
Gerbang logika OR dapat memiliki input lebih dari 2 yaitu 3 input dan 4 input. Simbol untuk gerbang logika OR 3 input dan 4 input adalah sebagai berikut
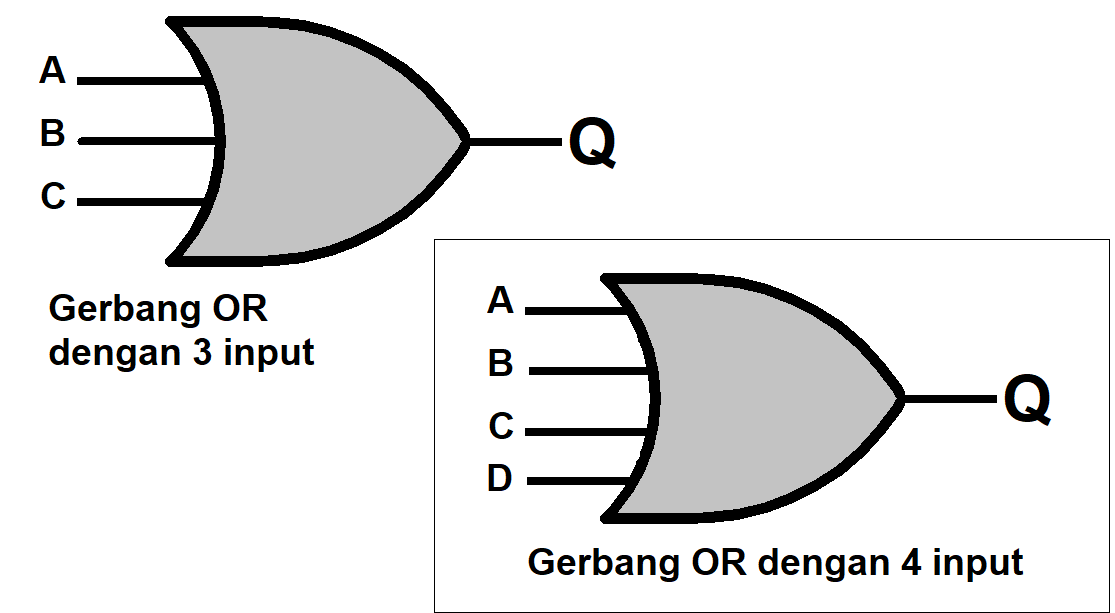
Gambar 5 simbol gerbang logika OR dengan 3 input dan 4 input
Berikut ini tabel kebenaran untuk gerbang logika OR 3 input dan 4 input .
Tabel 2 gerbang logika OR dengan 3 input dan 4 input
Catatan tambahan:
IC untuk gerbang-gerbang logika pada saat ini terdapat 2 jenis IC yaitu : IC dari keluargaTTL (Transistor-Transistor Logic) dan IC dari keluarga CMOS (Complementary Metal-Oxide-Silicon). IC TTL ditandai dengan awal angka 74LSXX atau 74HCXX, sedangkan IC CMOS diawali dengan huruf CDXXXX. Masing-masing IC memiliki kelemahan dan keunggulan sendiri-sendiri. Perbedaan utama IC TTL dan IC CMOS dapat adalah sebagai berikut.
| No | IC – TTL | IC – CMOS |
| 1 | Tahan terhadap listrik statis | Tidak tahan terhadap listrik statis |
| 2 | Konsumsi daya listrik lebih besar dibandingkan dengan IC CMOS | Lebih efisien dalam hal konsumsi daya listrik |
| 3 | Tegangan Vcc berkisar 4,75V hingga 5,25V | Tegangan Vcc berkisar 3V hingga 18 V |
| 4 | Rentan terhadap Noise | Tahan terhadap noise |
| 5 | Logika “0” berada pada rentang tegangan 0 – 0,8V
Logika “1” berada pada rentang tegangan 2,0 hingga 5V |
Logika “0” berada pada rentang tegangan 0 – 1,5V
Logika “1” berada pada rentang tegangan 3,0 hingga 18V |
| 6 | Harga murah | Harga lebih mahal jika dibandingkan dengan IC TTL |
Gerbang Logika AND
Gerbang logika dasar kedua adalah gerbang logika AND. Gerbang logika AND akan memberikan nilai “1” jika kedua inputnya bernilai “1”. Gerbang logika AND disimbolkan seperti pada gambar berikut ini.
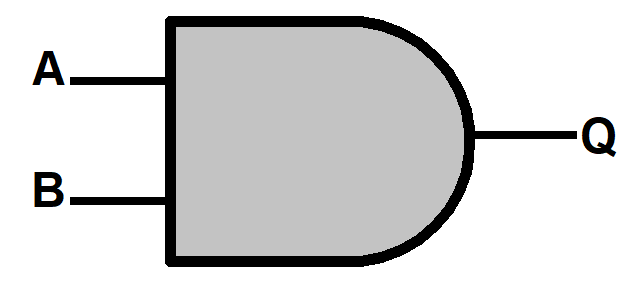
Gambar 6 simbol gerbang logika AND
Ekspresi persamaan Boolen untuk gerbang logika AND adalah :
Q = A.B
Tanda titik tidak dibaca “kali” tetapi dibaca “and” atau “dan”. Jadi ekspresi di atas dibaca : “Output Q hanya akan bernilai benar jika nilai input A dan input B bernilai benar”
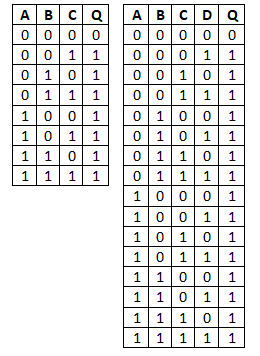
Tabel kebenaran gerbang logika AND dapat dilihat sebagai berikut
Tabel 3 logika AND

Logika AND dapat juga dibuat dari rangkaian 2 buah saklar secara seri seperti pada gambar berikut ini.
 Gambar 7 rangkaian saklar untuk logika AND
Gambar 7 rangkaian saklar untuk logika AND
Gambar 7 menunjukkan rangkaian 2 buah saklar secara seri untuk membentuk rangkaian logika AND. Saklar juga dirangkai secara seri dengan lampu dan baterai. Lampu hanya akan menyalah (logika “1”) jika kedua saklar dalam kondisi tertutup (logika “1”). Jika salah satu saklar terbuka, maka lampu akan mati.
Selain dengan menggunakan saklar, rangkaian logika AND juga bisa dibuat dengan menggunakan transistor seperti gambar berikut ini.
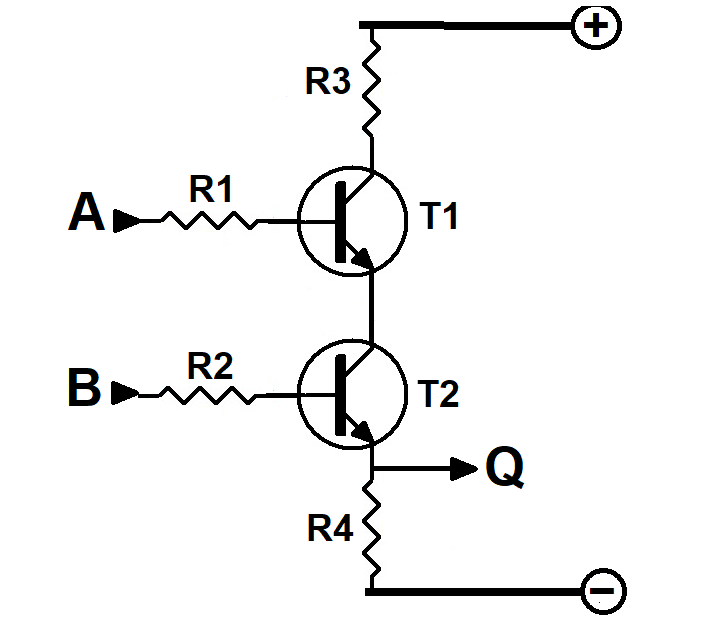
Gambar 8 rangkaian transistor untuk logika AND
Pada gambar 8, dua buah transistor dirangkai sebagai saklar dan diserikan sehingga pin A dan pin B harus bernilai tinggi (1) baru pin Q akan bernilai tinggi (1). R1 dan R2 berfungsi untuk membatasi arus basis, R3 berfungsi membatasi arus kolektor dan R4 berfungsi sebagai beban. Sedangkan IC untuk gerbang logika AND adalah :
- Dari jenis IC TTL antara lain :
74LS08 quad 2 input AND Gate
74LS11 triple 3 input AND Gate
74LS21 dual 4 input AND Gate
- Dari jenis IC CMOS antara lain:
CD4081 quad 2 input AND Gate
CD4073 triple 3 input AND Gate
CD4082 dual 4 input AND Gate
Konfigurasi pin untuk IC gerbang-gerbang logika dapat dilihat pada gambar berikut
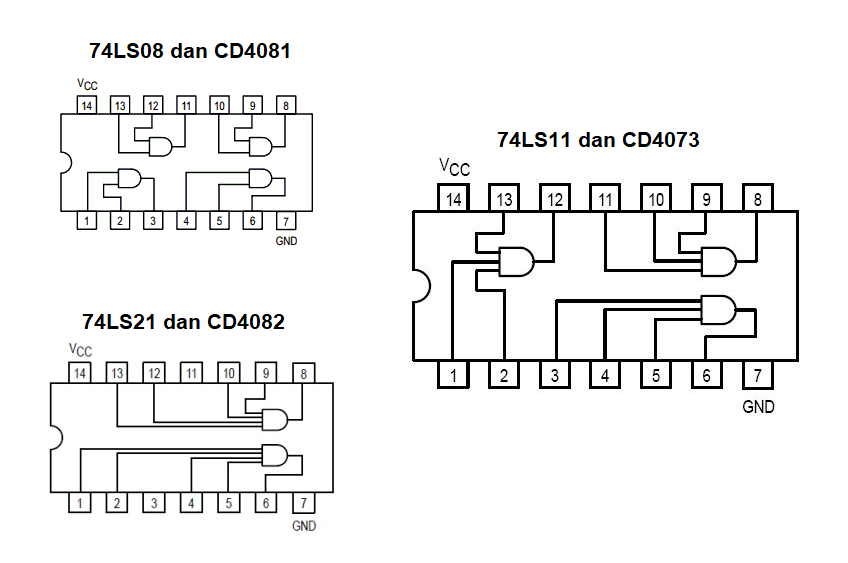
Gambar 9 konfigurasi pin untuk gerbang-gerbang logika AND
Gerbang logika AND dapat memiliki input lebih dari 2 yaitu 3 input dan 4 input. Simbol untuk gerbang logika AND 3 input dan 4 input adalah sebagai berikut

Gambar 10 simbol gerbang logika AND dengan 3 input dan 4 input
Berikut ini tabel kebenaran untuk gerbang logika OR 3 input dan 4 input .
Tabel 4 gerbang logika OR dengan 3 input dan 4 input
Gerbang logika NOT
Gerbang logika NOT merupakan gerbang logika dasar yang digunakan untuk membalikkan keadaan atau sering disebut sebagai inverter. Pada kondisi normal, output gerbang logika NOT akan memberikan nilai “1” dan akan berubah menjadi logika “0” ketika mendapat input “1”. Gerbang logika NOT memiliki ekspresi persamaan Boolean :
![]()
Gerbang logika NOT disimbolkan seperti gambar berikut ini.
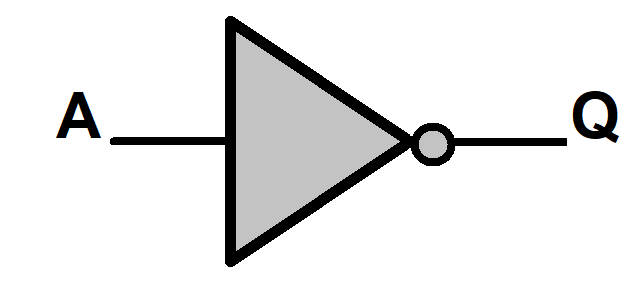
Gambar 11 simbol gerbang logika NOT
Tabel kebenaran untuk gerbang logika NOT adalah
Tabel 5 logika NOT

Gerbang logika Not dapat dibuat dengan rangkaian saklar dan resistor seperti berikut ini
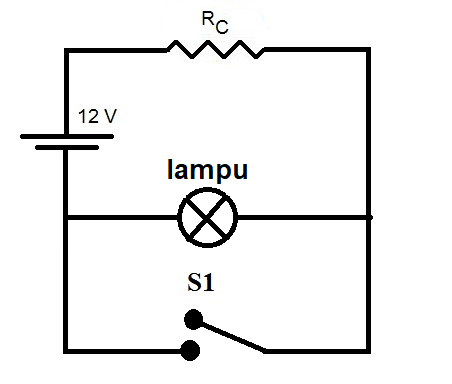
Gambar12 rangkaian saklar untuk logika NOT
Pada gambar 14 saklar S1 berfungsi sebagai input dan lampu sebagai output. Ketika kondisi normal, saklar S1 akan terbuka (logika “0”) dan lampu akan menyala (logika “1”) karena arus listrik mengalir dari baterai melalui resistor Rc menuju lampu, tetapi ketika saklar S1 ditutup (logika “1”) maka lampu akan padam (logika “0”) karena arus listrik lebih memilih melewati saklar yang tidak ada hambatan dibandingkan mengalir melalui lampu. Selain dengan menggunakan rangkaian saklar, logika NOT juga dapat dibentuk dengan menggunakan rangkaian transistor sederhana seperti pada gambar berikut ini.
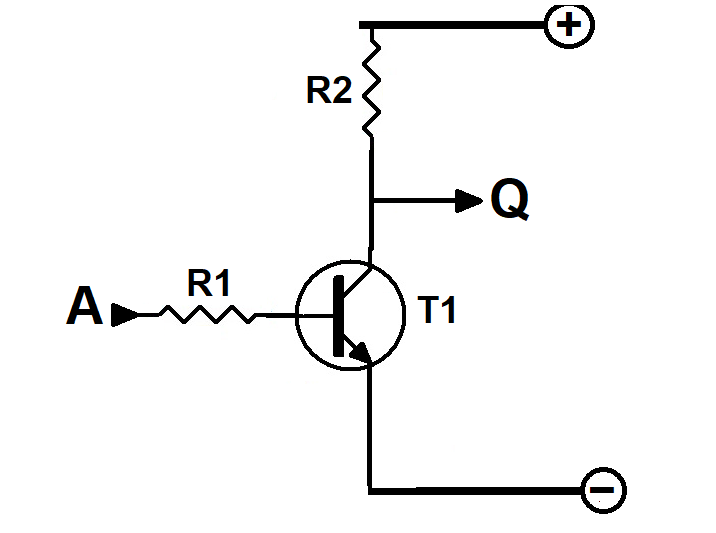
Gambar 13 rangkaian transistor untuk logika NOT
Pada gambar 15, Transistor T1 dirangkai sebagai saklar dengan R1 berfungsi untuk membatasi arus yang masuk ke basis dan R2 berfungsi untuk membatasi arus yang masuk ke kolektor. Pada kondisi normal pin A akan bernilai “0” karena tidak dihubungkan dengan sumber tegangan. Akibatnya transistor akan menyumbat sehingga tidak dapat mengalirkan arus listrik. Karena arus listrik tidak dapat mengalir melewati transistor, maka Pin Q akan bernilai tinggi (logika “1”) karena mendapatkan tegangan dari R2. Ketika pin A mendapatkan tegangan (logika “1”) maka transistor akan aktif dan menjadi jenuh, sehingga hambatannya akan turun mendekati nol, akibatnya arus listrik dapat mengalir melalui transistor. Karena arus listrik mengalir melalui transistor, maka titik pin Q akan bernilai rendah karena terhubung ke ground oleh transistor.
Gerbang logika NOT dalam bentuk IC antara lain :
- Dari IC TTL :
74 LS04 Hex Inverting NOT Gate
74LS14 Hex Schmitt Inverting NOT Gate
74LS004 Hex Inverting Drivers
- Dari IC CMOS :
CD4009 Hex Inverting NOT Gate
CD4069 Hex Inverting NOT Gate
Konfigurasi pin IC gerbang logika NOT dapat dilihat pada gambar berikut ini.
Gambar 14 konfigurasi pin IC gerbang logika NOT
Dalam satu unit IC gerbang logika NOT umumnya terdapat 6 buah gerbang logika NOT. selain itu gerbang logika NOT juga dapat dibentuk dari gerbang logika NOR dan NAND. Bagaimana cara membuat gerbang logika NOR dan NAND menjadi gerbang logika NOT akan dipelajari dipokok bahasan berikutnya.


DIODA
Dioda adalah komponen elektronika aktif yang paling dasar. Pada dioda hubungan tegangan (V) dengan kuat arus listrik (i) tidak linier seperti pada resistor, sehingga hukum Ohm tidak berlaku pada keadaan ini.
Dioda memiliki 2 buah kaki yang berbeda yaitu kaki katoda yang bermuatan negatif dan kaki anoda yang bermuatan positif. Arus listrik hanya dapat mengalir melalui kaki anoda ke kaki katoda, sebaliknya jika arus listrik masuk ke kaki katoda, maka arus listrik akan tertahan (tidak dapat lewat). Oleh sebab itu dioda sering digunakan sebagai penyearah arus listrik karena hanya dapat dilewati oleh arus listrik dari satu arah saja.
Konstruksi Dioda.
Sebelum mempelajari konstruksi dioda, ada baiknya terlebih dahulu kita mengulas sedikit tentang bahan semikonduktor. Di alam terdapat 3 jenis bahan yaitu
- Konduktor
Konduktor adalah bahan-bahan yang mudah menghantarkan listrik. Pada konduktor terdapat banyak elektron bebas yang dapat dengan mudah lepas dan berpindah. Bahan-bahan logam termasuk jenis bahan konduktor. Contoh bahan konduktor antara lain : perak, tembaga, emas, aluminium, tungsten, platinum , timbal, besi dan logam-logam lainnya
- Isolator
Isolator adalah bahan-bahan yang tidak dapat menghantarkan arus listrik. Pada bahan isolator tidak terdapat elektron bebas. Biasanya bahan-bahan non logam termasuk jenis isolator. Contoh bahan isolator antara lain : kayu (selulosa), karet, batu, kaca, kristal, plastik, dan bahan-bahan non logam lainnya.
- Semikonduktor
Bahan semikonduktor adalah bahan yang memiliki ciri khas tersendiri. Pada kondisi normal, bahan ini akan bersifat isolator karena energi yang dimiliki oleh elektron bebas bahan semikonduktor tidak cukup untuk melepaskan diri dari ikatan dengan inti atom. Apabila bahan ini mendapatkan sedikit energi dari luar, maka energi ini akan diserap oleh elektron bebas dan akibatnya elektron bebas memiliki cukup energi untuk melepaskan diri dari ikatan dengan inti atom. Pada kondisi ini bahan berubah menjadi konduktor. Contoh bahan semikonduktor antara lain : karbon, silikon dan germanium.
Bahan semikonduktor sendiri terbagi menjadi 2 jenis yaitu
- Bahan semikonduktor murni (Interinsik).
Bahan semikonduktor murni adalah bahan semikonduktor yang jumlah elektron bebas dan jumlah lubang di bagian pita konduksi (conduction band) seimbang (sama banyaknya). Contoh bahan semikonduktor murni adalah karbon murni, germanium murni dan silikon murni. Bahan semikonduktor murni benar-benar memiliki sifat semikonduktor, yaitu pada kondisi normal bahan bersifat isolator, tetapi jika bahan dipanaskan sehingga elektron beban memiliki cukup energi, maka bahan akan bersifat konduktor.
- Bahan semikonduktor tidak murni (Eksterinsik)
Bahan semikonduktor eksterinsik dibuat dari bahan semikonduktor interinsik yang dikotori (doppoing) dengan atom-atom lain sehingga jumlah elektron bebas atau lubang di pita konduksinya tidak seimbang. Karena mendapatkan sejumlah tambahan elektron bebas, atau kekurangan elektron bebas, maka bahan semikonduktor eksterinsik ini akan bersifat konduktor. Bahan semikonduktor eksterinsik ada 2 macam yaitu :
-
- Semikonduktor tipe P
Semikonduktor tipe P adalah semikonduktor yang dibuat dari bahan semikonduktor interinsik (murni) yang dikotori dengan atom-atom logam lain yang kekurangan elektron sehingga jumlah lubangnya (muatan +) lebih banyak dari pada jumlah elektron bebasnya. Akibatnya bahan semikonduktor ini akan bermuatan positif oleh sebab itu disebut semikonduktor tipe P. Contoh semikonduktor tipe P adalah silikon murni (Si) yang dikotori dengan atom-atom indium (In).
Untuk lebih mudah mempelajari konstruksi dioda, maka semikonduktor tipe P akan kita gambar seperti gambar berikut ini.
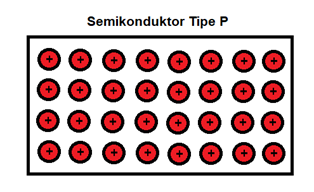
Gambar 1 model semikonduktor tipe P
-
- Semikonduktor tipe N
Semikonduktor tipe N adalah semikonduktor yang dibuat dari bahan semikonduktor interinsik (murni) yang dikotori dengan atom-atom lain yang kelebihan elektron sehingga jumlah elektron bebasnya (muatan -) lebih banyak dari pada jumlah lubangnya. Akibatnya bahan semikonduktor ini akan bermuatan negatif oleh sebab itu disebut semikonduktor tipe N. Contoh semikonduktor tipe N adalah silikon murni (Si) yang dikotori dengan atom-atom arsen (As).
Untuk lebih mudah mempelajari konstruksi dioda, maka semikonduktor tipe N akan kita gambar seperti gambar berikut ini.
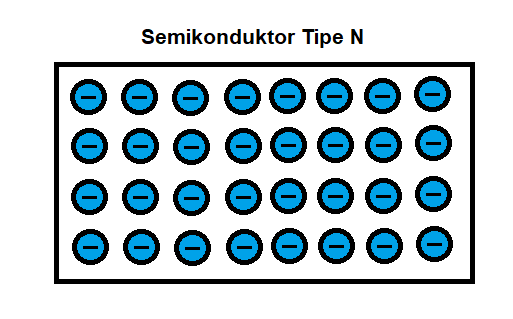
Gambar 2 model semikonduktor tipe N
Jika kedua jenis semikonduktor ini (semikonduktor tipe P dan semikonduktor tipe N) digabung menjadi satu maka pada batas sambungan antara semikonduktor tipe P dan tipe N akan terbentuk zona netral yang disebut buffer zone.
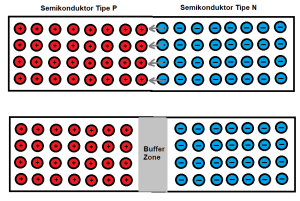
Gambar 3 gabungan (junction) semikonduktor tipe P dengan semikonduktor tipe N yang membentuk buffer zone di daerah sambungan (junction)
Zona penyangga (buffer zone) ini bersifat netral dan isolator. Elektron bebas dari semikonduktor tipe N tidak dapat melompati zona penyangga ini karena tidak memiliki cukup energi. Jika sisi semikonduktor tipe P dan semikonduktor tipe N dipasang sebuah batang konduktor (kaki), maka jadi lah sebuah dioda.
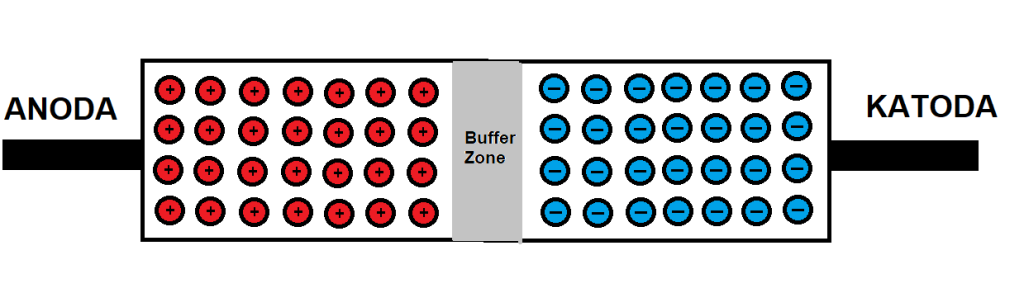
Gambar 4 konstruksi dioda
Kaki dioda yang kelebihan lubang (muatan positif) disebut kaki Anoda, sedangkan kaki dioda yang kelebihan elektron (muatan negatif) disebut kaki Katoda. Pada kondisi fisik sebenarnya, kaki katoda selalu ditandai dengan gelang untuk membedakan dengan kaki anoda.
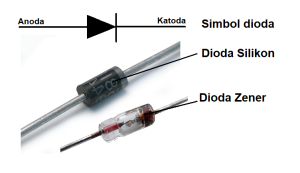
Gambar 5 simbol dioda dan contoh dioda silikon (dioda daya) dan dioda zener
Jadi dioda pada dasarnya dibuat dari gabungan 2 semikonduktor tipe P dan semokonduktor tipe N.
Cara kerja Dioda
Dioda dibuat dari gabungan semikonduktor tipe P dengan semikonduktor tipe N, pada daerah sambungan kedua semikonduktor ini akan terbentuk zona penyangga yang bersifat netral dan isolator. Untuk mempelajari cara kerja dioda marilah kita rangkai sebuah dioda dengan sumber tegangan DC seperti pada gambar berikut ini.

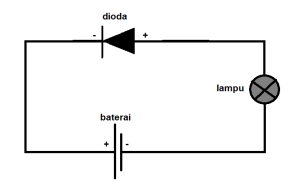
Gambar 6 dioda yang dirangkai dengan sebuah sumber tegangan dan lampu
Pada gambar 6 terlihat sebuah dioda dirangkai dengan sebuah lampu dan sebuah baterai sebagai sumber tegangan. Kaki Anoda dioda (+) dihubungkan dengan kutub postif (+) sumber tegangan, sedangkan kaki Katoda dioda (-) dihubungan dengan kutub negatif (-) sumber tegangan dengan melalui sebuah lampu pijar. Jika rangkaian pada gambar 6 ini digambarkan ulang dengan menggunakan gambar konstruksi dioda, maka akan tampak seperti pada gambar berikut ini.
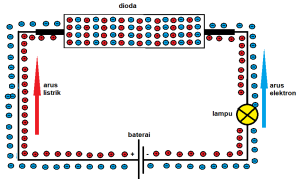
Ketika kaki anoda dioda dihubungkan dengan kutub positif baterai, dan kaki katoda dihubungkan dengan kutub negatif baterai, maka elektron bebas dari baterai akan memberikan cukup energi ke elektron-elektron bebas yang ada di kaki katoda. akibatnya elektron-elektron bebas tersebut dapat melompati buffer zone sehingga elektron akan mengalir ke sisi anoda dioda dan menuju ke kutub positif baterai. Demikian juga dengan muatan positif akan terdesak ke katoda dan mengalir ke kutub negatif baterai. Pada saat terjadi aliran arus elektron dari kutub negatif ke kutub positif, maka akn timbul arus listrik yang mengalir berlawanan dengan aliran elektron yaitu dari kutub positif menuju ke kutub negatif. Karena ada arus listrik yang mengalir melewati bohlam lampu, maka lampu akan menyalah.
Kondisi dioda yang kaki katoda dihubungkan dengan kutub negatif dan kaki anoda dihubungkan dengan kutub postif ini disebut dioda mendapatkan bias maju. Sekarang mari kira lihat kondisi sebaliknya seperti pada gambar berikut ini.
Gambar 8 dioda mendapat bias balik
Gambar 9 menunjukan sebuah dioda yang dirangkai dengan bias balik. Kaki katoda dioda dihubungkan ke kutub positif sumber tegangan, sedangkan kaki anoda dioda dihubungkan melalui sebuah lampu ke kutub negatif sumber tegangan. Jika rangkaian ini dimodelkan dengan model seperti pada gambar 7 maka didapat.
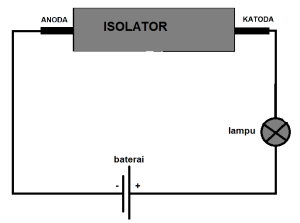
Gambar 9 ilustrasi bias balik pada dioda
Ketika kaki anoda dioda yang kekurangan elektron (kelebihan lubang atau muatan positif) dihubungkan dengan kutub negatif sumber tegangan, maka yang terjadi adalah elektron-elektron dari sumber tegangan akan mengisi lubang-lubang pada sisi anoda. demikian juga dengan kaki katoda dioda, kaki katoda dioda yang kelebihan elektron ketika dihubungkan dengan kutub positif sumber tegangan, maka elektron-elektron dari sisi katoda akan mengalir ke sumber tegangan sehingga sisi katoda dioda akan menjadi netral. Akibatnya zona penyanggah pada dioda akan menjadi semakin lebar dan dioda berubah menjadi isolator. Kondisi ini menyebabkan arus listrik tidak dapat mengalir sehingga lampu padam. Rangkaian yang demikian disebut rangkaian bias balik dioda.
Karakteristik Dioda
Setiap komponen elektronika memiliki karakteristik (sifat) nya sendiri-sendiri, demikian juga dengan dioda. Dioda mempunyai karakter yang unik terhadap tegangan dan arus listrik yang bekerja padanya. Oleh karena dioda dapat dirangkai dengan 2 cara yaitu dengan bias maju dan bias mundur, maka kurva karakteristik dioda juga akan meliputi kondisi bias maju dan bias mundur.
Pada saat dioda dirangkai secara bias maju, tidak serta merta arus listrik akan langsung mengalir melaluinya. Dioda memiliki tegangan minimal yang harus dipenuhi agar elektron dapat melompati zona penyanggah. Besar tegangan minimal ini disebut tegangan knee. Nilai tegangan knee untuk tiap jenis dioda berbeda-beda tergantung dari material dasar dioda, tegangan knee rata-rata dioda jenis silikon adalah 0,7V. Artinya dioda belum dapat bekerja dengan optimal ketika tegangannya masih di bawa 0,7V dan mulai bekerja optimum ketika tegangannya melebih 0,7V. Tegangan 0,7V ini juga merupakan tegangan drop (jepit) pada dioda. Kurva hubungan tegangan dan arus listrik pada saat dioda diberikan bias maju dapat dilihat pada gambar berikut ini.
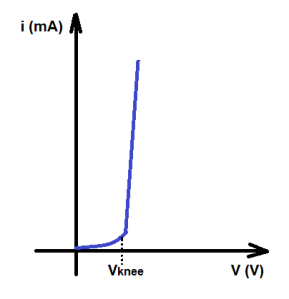
Gambar 10 kurva hubungan i dan V bias maju dioda
Ketika dioda diberikan bias balik, maka dioda akan bekerja sebagai sebuah isolator arus listrik. Dioda akan menahan sehingga arus listrik tidak dapat mengalir. Secara ideal digambarkan tidak ada arus listrik yang mengalir sama sekali, tetapi jika diuji secara eksperimental, biasanya terdapat sejumlah kecil arus listrik yang bisa melewati dioda. kondisi ini disebut arus bocor. Semakin kecil arus bocor, maka semakin bagus mutu sebuah dioda. Kemampuan dioda untuk menahan arus listrik ini ada batasnya. Jika tegangan balik terus dinaikkan, maka pada besar tegangan balik tertentu dioda akan rusak. Tegangan balik maksimum yang dapat ditahan oleh dioda sebelum dioda rusak di sebut Breakdown Voltage (tegangan rusak). Kurva hubungan arus listrik dan tegangan balik pada dioda dapat dilihat pada gambar 11 berikut ini.
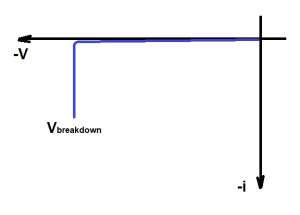
Gambar 11 kurva hubungan arus listrik dengan tegangan balik dioda
JIka kedua kurva tersebut digabung menjadi satu, maka didapat kurva karakteristik dioda seperti pada gambar berikut ini.
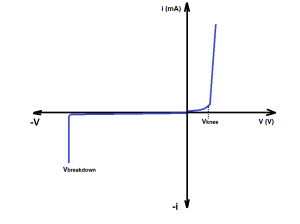
Gambar 12 kurva karakteristik dioda
